Smart Room dapat dibuat dengan menggunakan mikroprosesor. Berikut ini tahap-tahap pembuatan smart room tersebut.
Menentukan Tujuan Smart Room
Tahap pertama dari sebuah pekerjaan/proyek adalah menentukan tujuan utama pekerjaan tersebut.
Berikut ini beberapa alternatif tujuan sebuah smart room
- Meningkatkan kenyamanan ruangan, bisa dari sisi pencahayaan, temperatur, kelembaban
- Menghemat pemakaian energi. Suatu ruangan memerlukan temperatur untuk penerangan dan pemanasan/pendinginan
- Meningkatkan keamanan ruangan
Menentukan Spesifikasi Sistem
Setelah tujuan ditentukan,berikutnya adalah menentukan spesifikasi teknis dari ruangan tersebut.
Hal-hal yang perlu diperhatikan pada spesifikasi smart-room:
- Apakah temperatur perlu diukur?
- Apakah temperatur perlu dikendalikan?
- Apakah kelembaban perlu diukur?
- Apakah kelembaban perlu dikendalikan?
- Apakah cahaya perlu diukur?
- Apakah cahaya perlu dikendalikan?
- Temperatur ruangan diukur dengan ketelitian tertentu, misal 1 derajat Celcius, 0,5 derajat Celcius dan sebagainya
- Rentang temperatur ruangan ditentukan. Hal ini untuk menentukan rentang sensor temperatur yang diperlukan.
- Target temperatur yang diinginkan
- Ketelitian pengukuran kelembaban.
- Rentang kelembaban ruangan yang perlu diukur
- Target kelembaban yang diinginkan.
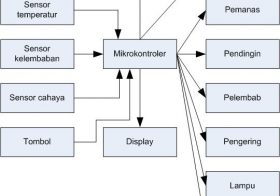
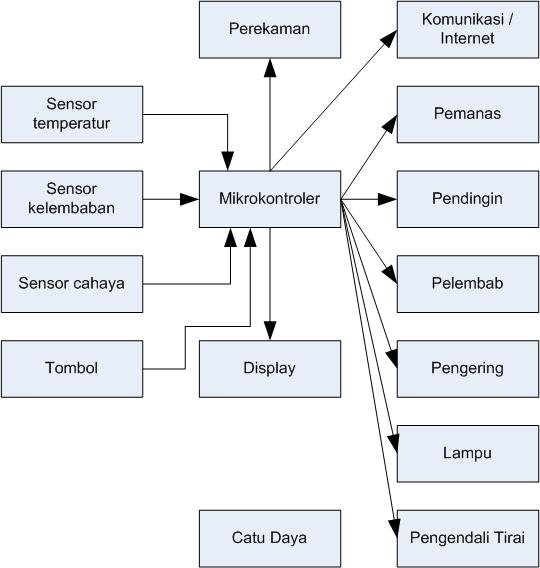
Membuat Perancangan Sistem Secara Keseluruhan
Pada tahap ini dibuat arsitektur sistem secara keseluruhan. Aliran data & informasi ditentukan.
Perancangan perangkat keras
Pada tahap ini dilakukan pembuatan rancangan perangkat keras.
Hal-hal yang perlu ditentukan:
- Menentukan mikrokontroler yang dipakai , jika menggunakan mikroprosesor
- Menentukan sensor-sensor yang dipakai
- Menentukan aktuator-aktuator yang diperlukan
- Menentukan catu daya (power supply) yang diperlukan
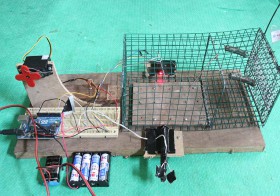
- Kotak untuk menyimpan perangkat
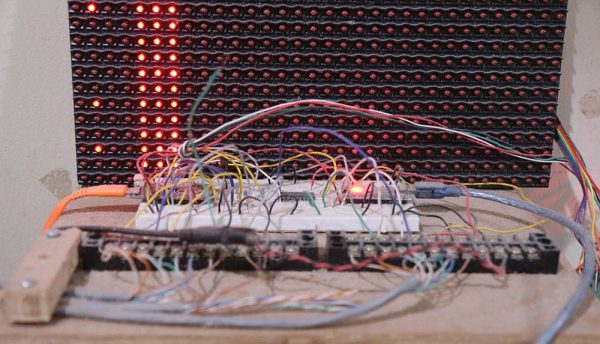
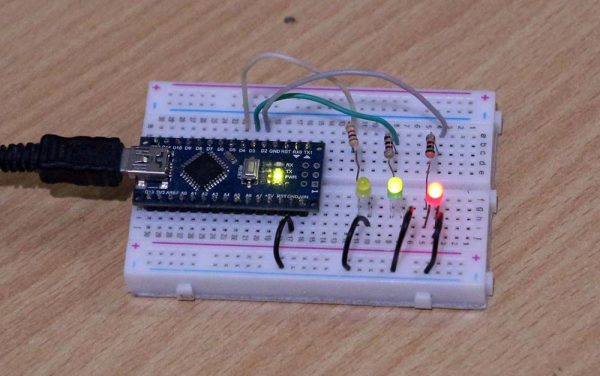
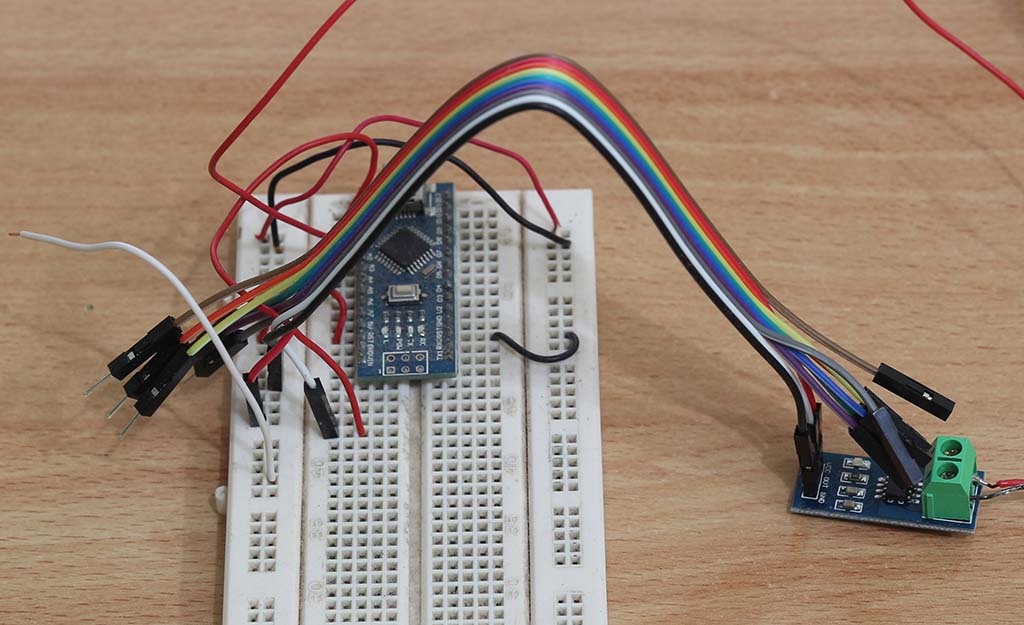
Berikut ini contoh sistem smart room dengan sebuah mikrokontroler sebagai pengendali utama.
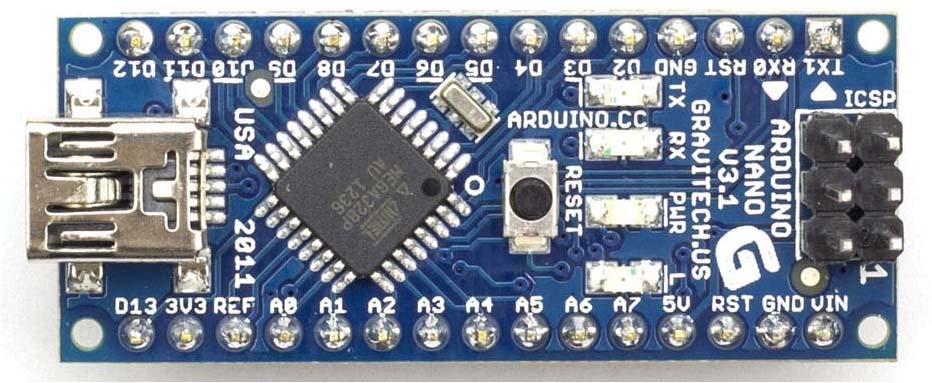
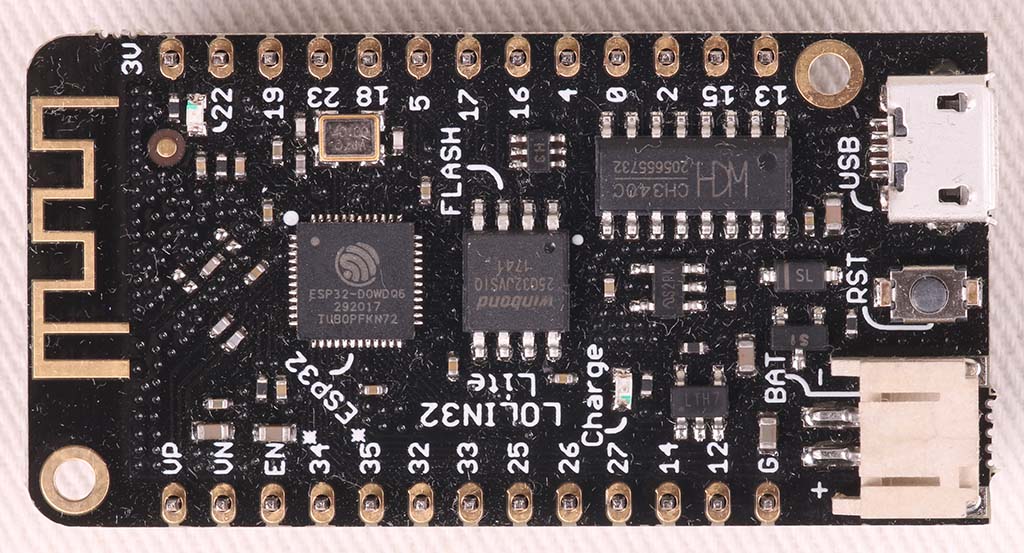
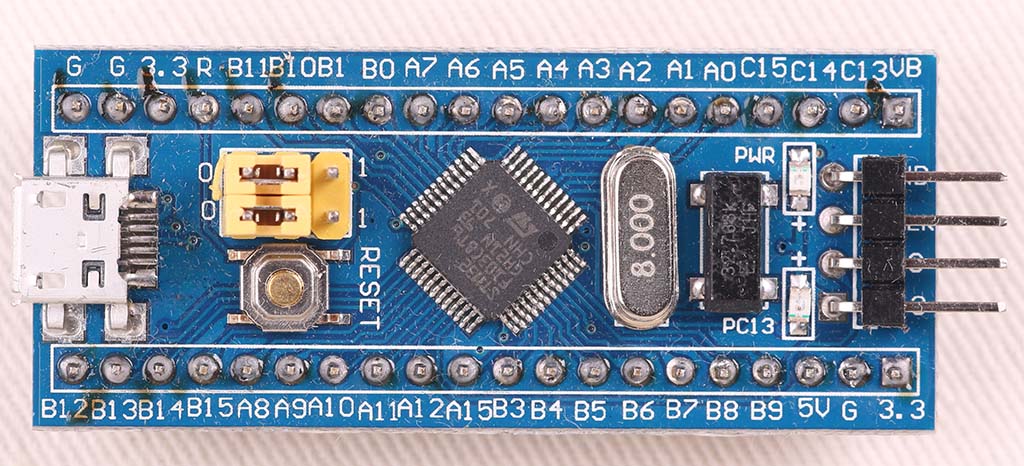
Contoh prosesor populer yang dapat dipakai di antaranya:
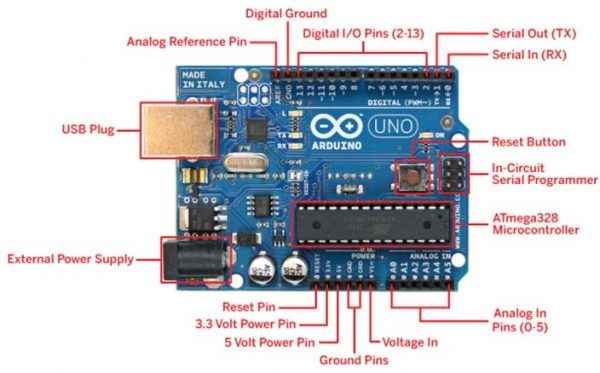
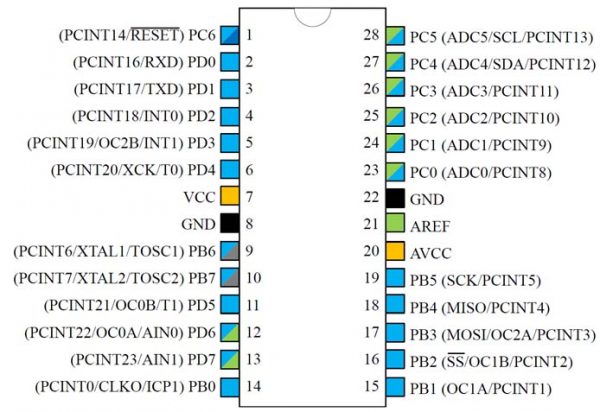
- Arduino UNO (ATmega328)
- Arduino Nano (ATmega328)
- ESP32 (Espressif)
- ESP8266
ESP32 dan ESP8266 dapat dipakai jika kita memerlukan WiFi atau Bluetooth. Jika tidak perlu komunikasi nirkabel, cukup menggunakan Arduino berbasis ATmega328.
Contoh sensor yang dapat dipakai
- LM35: sensor temperatur analog
- DS18S20: sensor temperatur digital
- BMP280: sensor temperatur dan tekanan udara
- BME280: sensor temperatur, kelembaban dan tekanan udara
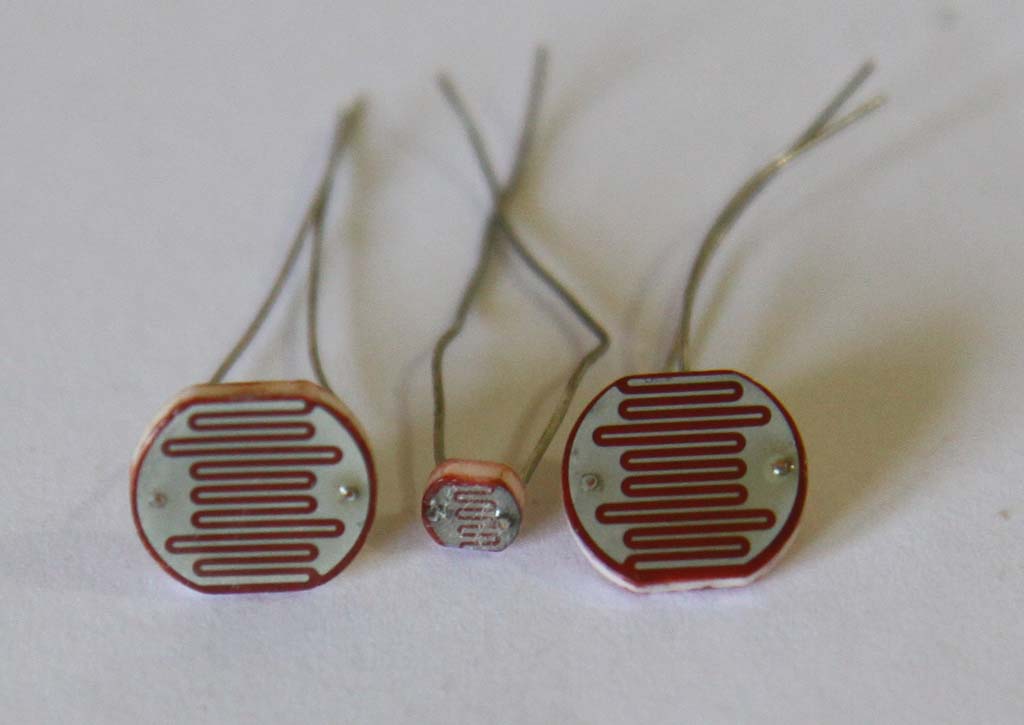
- LDR (Light Dependent Resistor): sensor cahaya
- Photodiode : sensor cahaya
Contoh Display yang dapat dipakai:
- LCD 16×2
- LCD 20×4
- LCD matrix
Perancangan perangkat lunak
Pada tahap ini dilakukan hal-hal sebagai berikut
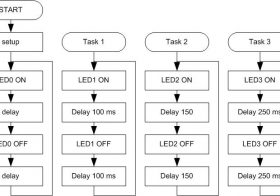
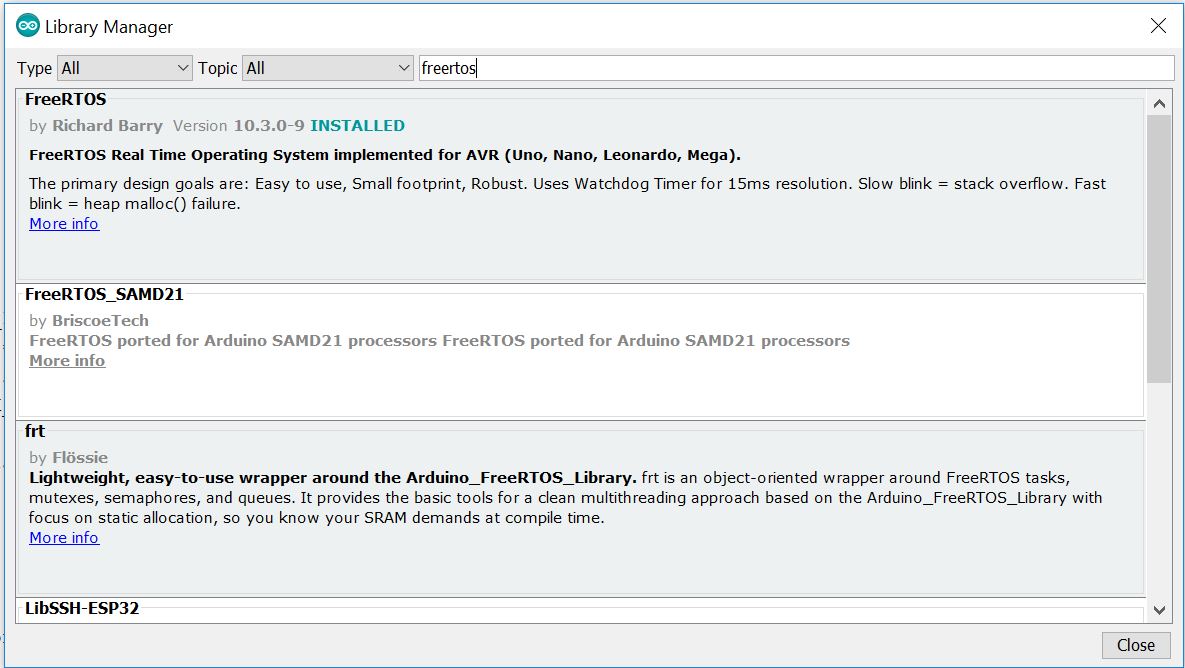
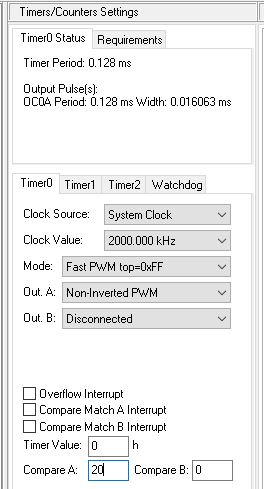
- menentukan apakah akan menggunakan sistem operasi. pada sistem seperti ini sering dipakai sistem operasi waktu nyata (Real Time Operating System /RTOS ). Salah satu RTOS yang sering dipakai adalah FreeRTOS (https://www.freertos.org/)
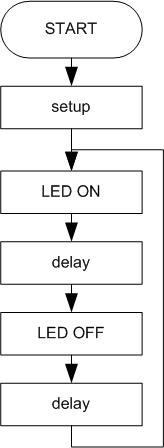
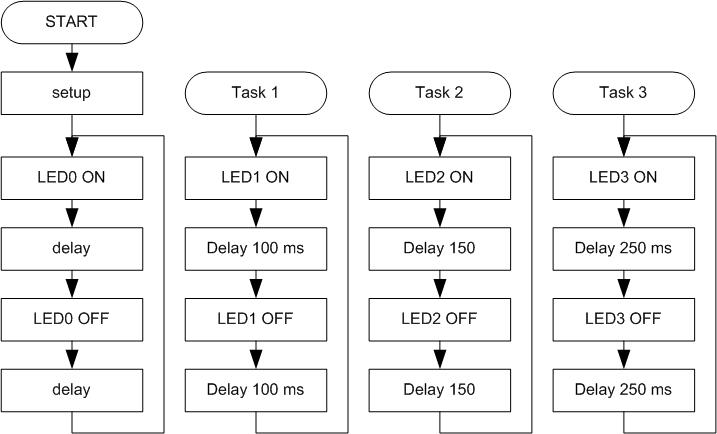
- membuat model diagram alir (flow chart)
- membuat model aliran data (data flow diagram)
- membuat model FSM (finite state machine) jika pada sistem terdapat proses yang memerlukan FSM
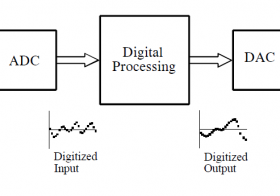
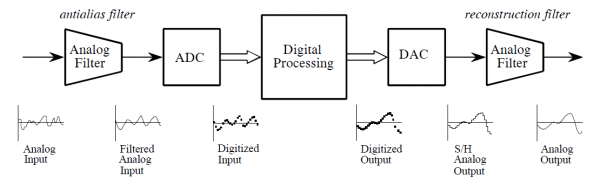
- membuat model pengolahan sinyal dengan DSP (Digital Signal Processing), jika terdapat pengolahan sinyal secara digital. Umumnya melibatkan filter digital , equalizer digital, perekaman data digital.
Implementasi Perangkat Keras
Pada tahap ini dibuat papan rangkaian dengan PCB (Printed Circuit Board)
Implementasi Perangkat Lunak
Pada tahap ini dilakukan proses pembuatan perangkat lunak untuk mikrokontroler
Pengujian sistem
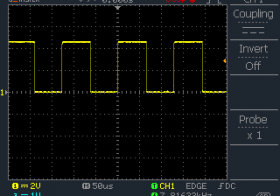
Pada tahap ini dilakukan pengujian untuk membandingkan antara perilaku sistem dengan spesifikasi yang diinginkan. Untuk itu diperlukan pengukuran-pengukuran untuk kemudian dibandingkan dengan angka-angka yang diinginkan pada spesifikasi.
Pengujian ini biasanya dilakukan secara kuantitatif, sehingga cukup obyektif.
Perangkat yang diperlukan untuk pengujian sistem di antaranya
- Termometer digital atau analog sesuai dengan rentang temperatur dan ketelitian yang diinginkan
- Higrometer digital atau analog sesuai dengan rentang kelembaban dan ketelitian pengukuran kelembaban.
- Light Meter untuk mengukur pencahayaan ruangan
- Voltmeter / Wattmeter untuk mengukur unjuk kerja tegangan/ arus/ daya pada rangkaian.
Validasi Sistem
Pada tahap ini dilakukan perbandingan antara tujuan sistem dengan perilaku sistem. Jika sistem yang dibuat sudah dapat menyelesaikan permasalahan di tujuan, maka sistem dapat dikatakan sudah berhasil divalidasi.
Validasi ini biasanya dilakukan secara kualitatif sehinggak agak sedikit subyektif.