Apa yang dimaksud dengan mikrokontroler?
Jawab: Pengertian mikrokontroler adalah suatu komputer kecil dalam satu keping rangkaian terintegrasi. Suatu mikrokontroler di dalamnya terdiri dari satu atau lebih CPU (Central Processing Unit / Unit pengolahan terpusat) dengan sejumlah memori dan periferal input/output.
Mengapa mikrokontroler disebut sebagai komputer?
Jawab: Mikrokontroler disebut sebagai komputer karena memang mikrokontroler adalah suatu komputer lengkap. Perbedaan khusus dibandingkan komputer biasa adalah semua komponen komputer pada mikrokontroler sudah terkandung dalam satu rangkaian terintegrasi, sedangkan pada komputer biasa komponen-komponen tersebut berada pada beberapa keping rangkaian terintegrasi.
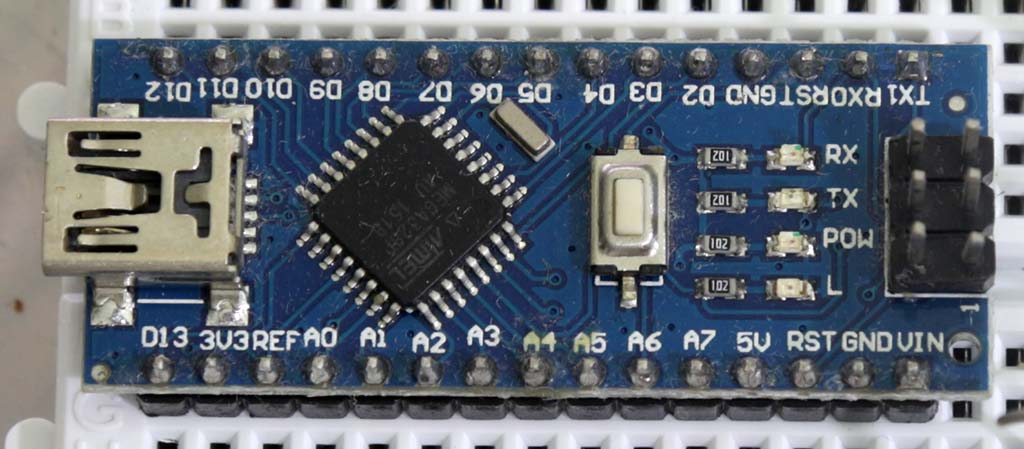
Sebagai contoh, Arduino UNO / Nano di dalamnya ada komponen utama mikrokontroler tipe ATmega328 . Di dalam ATmega328 ini sudah ada CPU, memori flash untuk menampung program, memori RAM (Random Access Memory) untuk menampung variabel di perangkat lunak, dan EEPROM (Electrically Erasable Programmable Read Only Memory) untuk menampung data yang dapat diubah oleh program namun tidak hilang kalau listrik dimatikan.
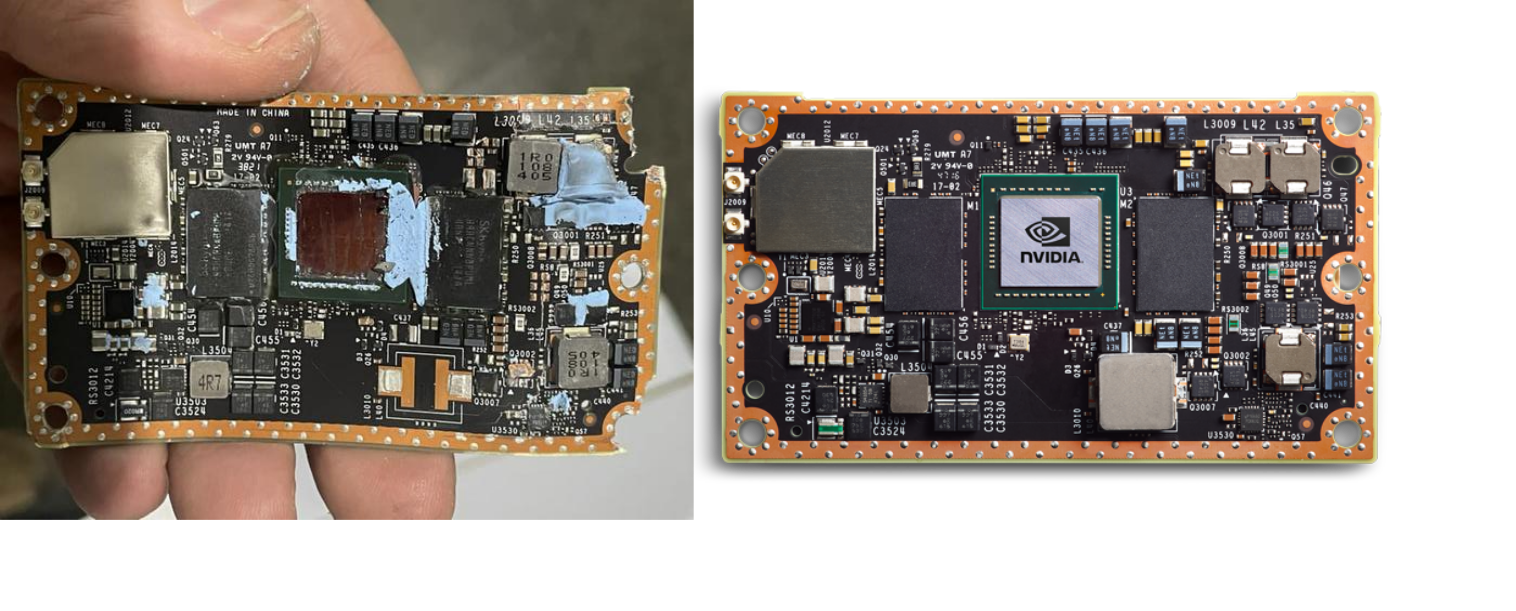
Berikut ini foto ATmega328
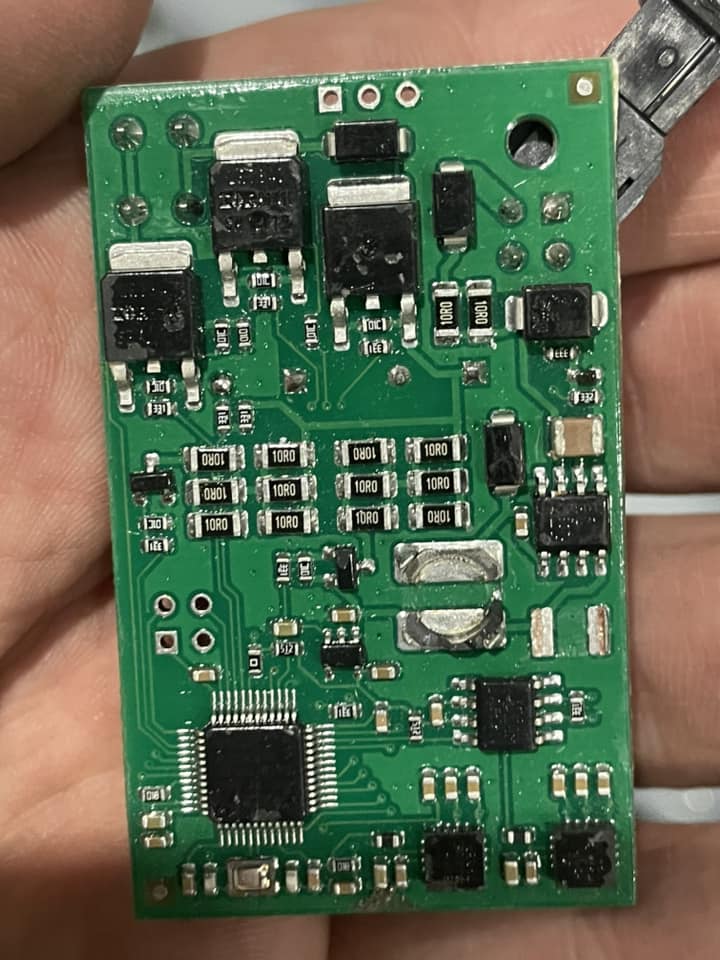
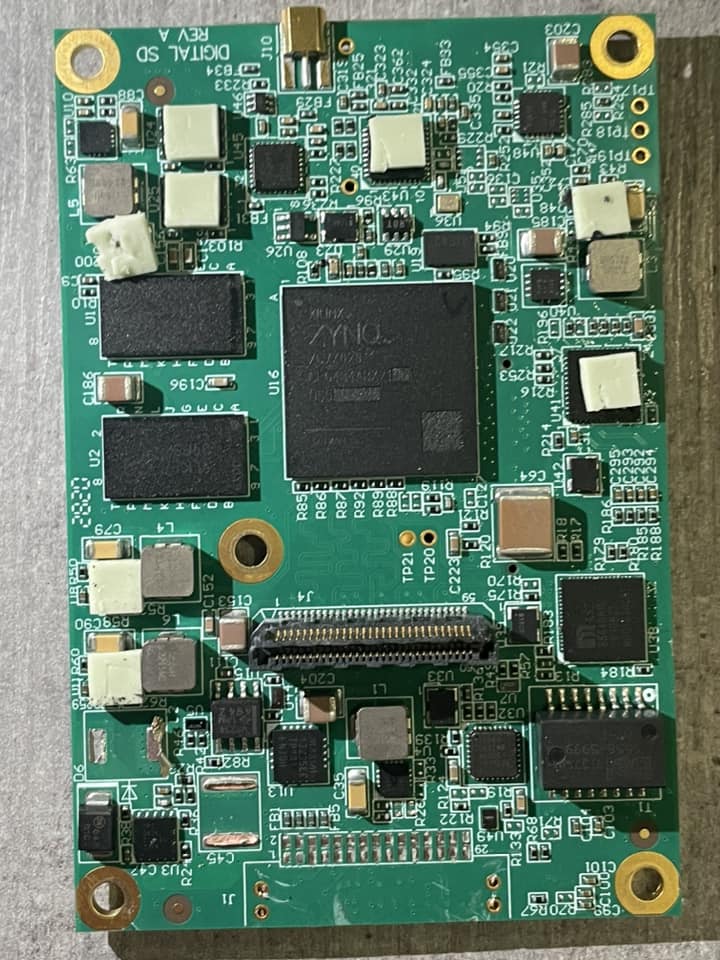
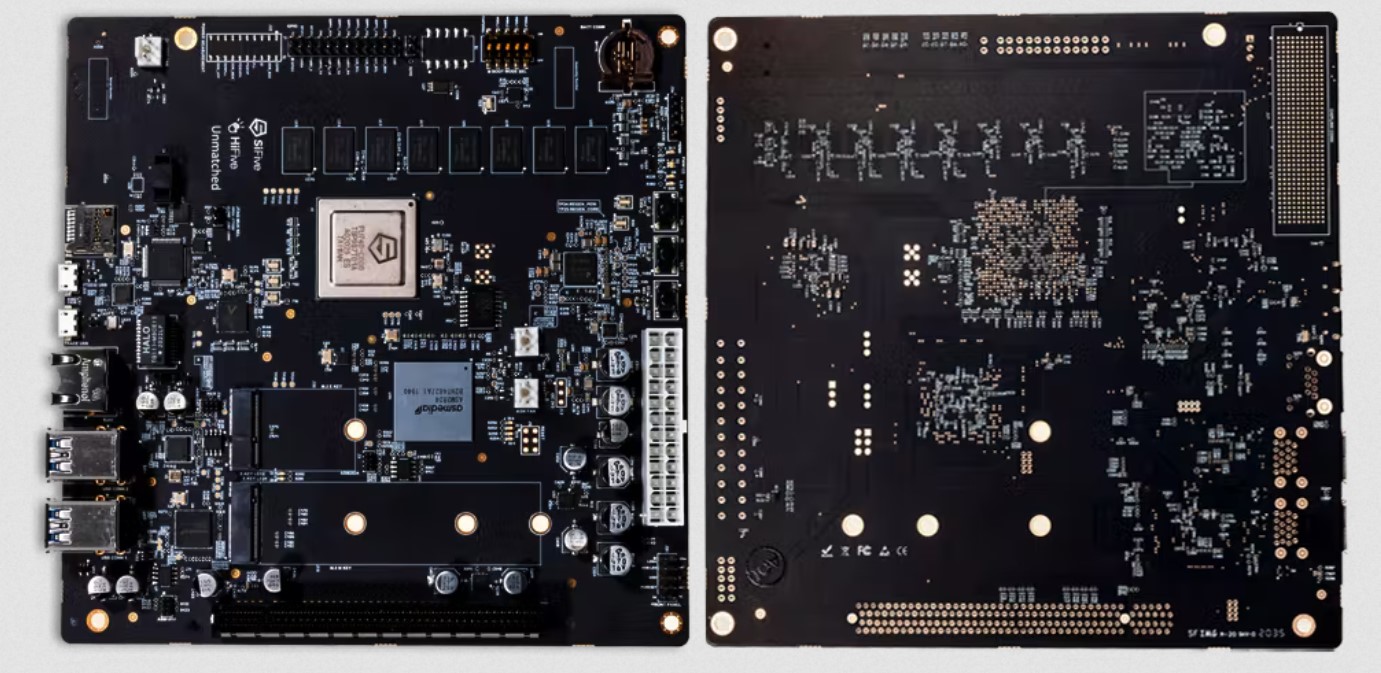
 Sebagai perbandingan , motherboard komputer desktop memiliki CPU, memori dan periferal masing-masing pada rangkaian terintegrasi yang terpisah. Berikut ini contoh papan rangkaian motherboard.
Sebagai perbandingan , motherboard komputer desktop memiliki CPU, memori dan periferal masing-masing pada rangkaian terintegrasi yang terpisah. Berikut ini contoh papan rangkaian motherboard.
Berikut ini contoh CPU AMD Ryzen 9 5950X. Dalam rangkaian terintegrasi ini hanya ada CPU saja, belum dilengkapi dengan RAM maupun periferal lain.
Referensi
- https://en.wikipedia.org/wiki/Motherboard
Kenapa mikrokontroler sering disebut juga sebagai komputer mini?
Mikrokontroler sering disebut juga sebagai komputer mini karena mikrokontroler sudah merupakan satu komputer lengkap yang dapat menjalankan perangkat lunak, dan ukurannya kecil (maka disebut sebagai mini).
Istilah ‘minicomputer’ sebenarnya pernah dipakai di tahun 1960-an untuk menyebut komputer serba guna yang ada di era itu. Ukurannya cukup besar dibandingkan komputer zaman sekarang. Lebih jauh dapat dibaca di https://en.wikipedia.org/wiki/Minicomputer
Apakah mikrokontroler termasuk ke dalam komputer?
Ya, mikrokontroler termasuk dalam salah satu jenis komputer.
Apa contoh mikrokontroler?
Contoh mikrokontroler di antaranya:
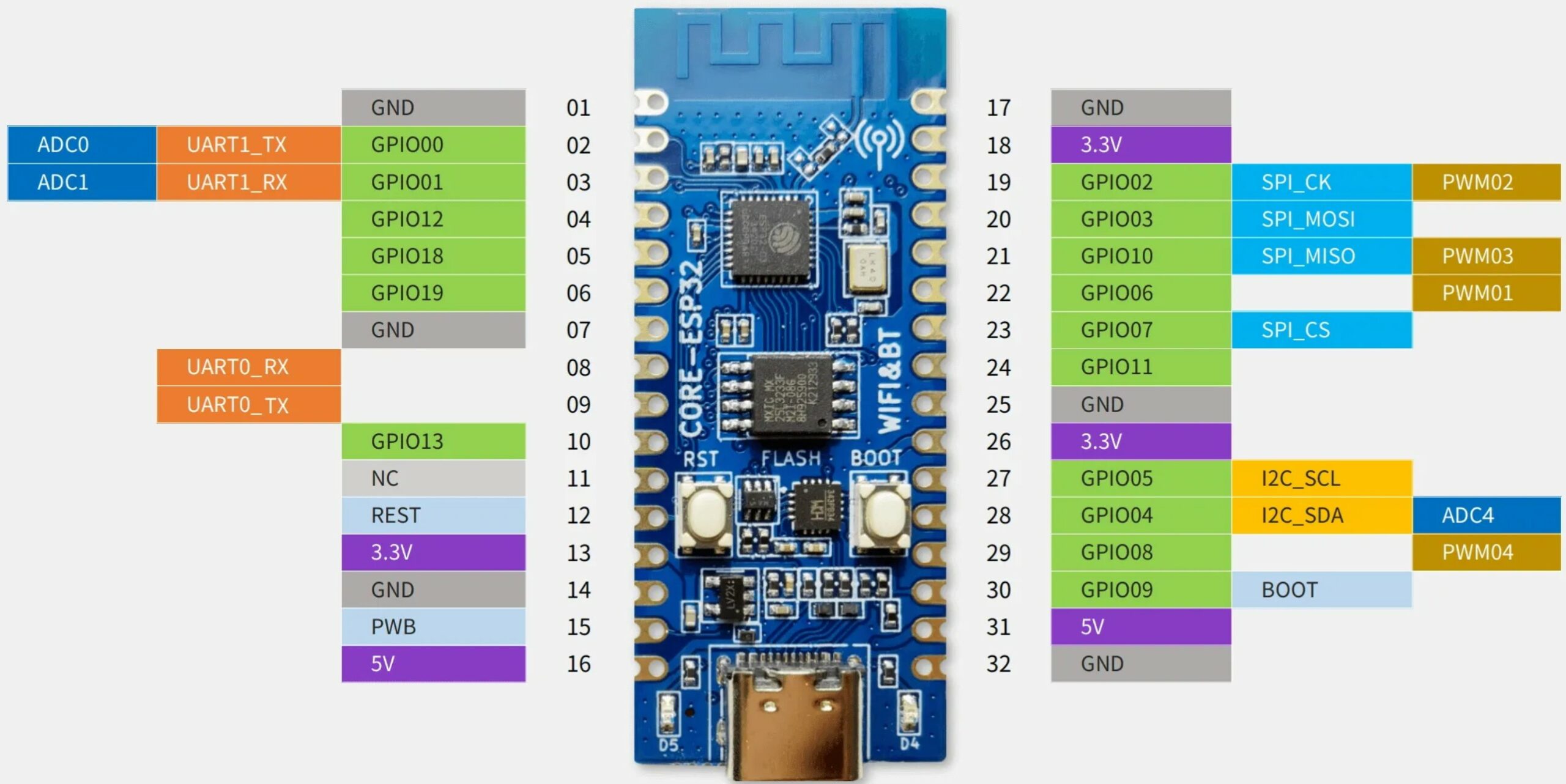
- ESP32
- ESP8266
- ATmega328 yang dipakai di Arduino Nano dan Arduino UNO
- RP2040 yang dipakai di Arduino Nano RP2040
- Keluarga STM32 , seperti STM32F103C8T6 yang dipakai di modul Blue Pill
- nRF52840 yang dipakai di Arduio Nano 33 BLE Sense
- Atmel SAM3X8E yang dipakai di Arduino Due
Referensi
- RP2040 https://en.wikipedia.org/wiki/RP2040
- ATmega328 https://www.microchip.com/en-us/product/atmega328
- ESP32 https://en.wikipedia.org/wiki/ESP32
- STM32 Blue Pill https://stm32-base.org/boards/STM32F103C8T6-Blue-Pill.html
Apa kelebihan mikrokontroler
Keuntungan mikrokontroler dan keistimewaan dibandingkan mikroprosesor biasa adalah:
- ukuran kecil karena semua komponen komputer sudah ada dalam satu keping chip.
- penggunaan daya kecil
- pembuatan perangkat keras / rangkaian lebih mudah karena rangkaian lebih sederhana
Apa kekurangan mikrokontroler?
Kekurangan mikrokontroler adalah terutama pada ukurannya yang kecil, harus muat di dalam satu keping rangkaian terintegrasi. Akibatnya kemampuan komputasinya terbatas, memori terbatas, periferal juga terbatas dibandingkan dengan mikroprosesor.
Kemampuan komputasi terbatas artinya kecepatan komputasi relatif lambat.
Periferal terbatas, artinya input output digital maupun analog terbatas. Media penyimpanan terbatas. Jika perlu penyimpanan tambahan, biasanya untuk mikrokontroler menggunakan memori tipe SD card. Mikroprosesor dapat menggunakan media besar seperti flashdisk, SSD dan hard disk.
Mikrokontroler pakai bahasa apa?
Mikrokontroler yang ada saat ini umumnya diprogram menggunakan bahasa pemrograman Assembly, C dan C++. Bahasa lain jarang dipakai, misalkan sebagai berikut:
- Python dipakai di NodeMCU dengan bahasa MicroPython (https://micropython.org/)
- Rust dipakai untuk ESP32 https://github.com/esp-rs/awesome-esp-rust
- TinyGo (versi kecil dari Go) https://tinygo.org/
Apa singkatan dari mikrokontroler?
Mikrokontroler sering disingkat sebagai MCU (Microcontroller Unit)
Apa fungsi ALU dalam mikrokontroler?
ALU (Arithmetic & Logic Unit) adalah bagian dari CPU (Central Processing Unit), sedangkan CPU adalah bagian dari mikrokontroler. Fungsi ALU pada mikrokontroler sama seperti fungsi ALU pada CPU, yaitu untuk melakukan proses perhitungan aritmatik (tambah kurang kali bagi) dan logika (AND, OR, NOT, penggeseran bit)
Apa bagian dari mikrokontroler?
Bagian-bagian utama dari mikrokontroler adalah: CPU, memori dan periferal.
- CPU (Central Processing Unit) berfungsi mengatur seluruh aktivitas di dalam mikrokontroler
- Memori berfungsi untuk menyimpan program dan variabel-variabel.
- Periferal berfungsi menghubungkan mikrokontroler ke dunia luar
Sebagai contoh, berikut ini blok diagram mikrokontroler ESP32
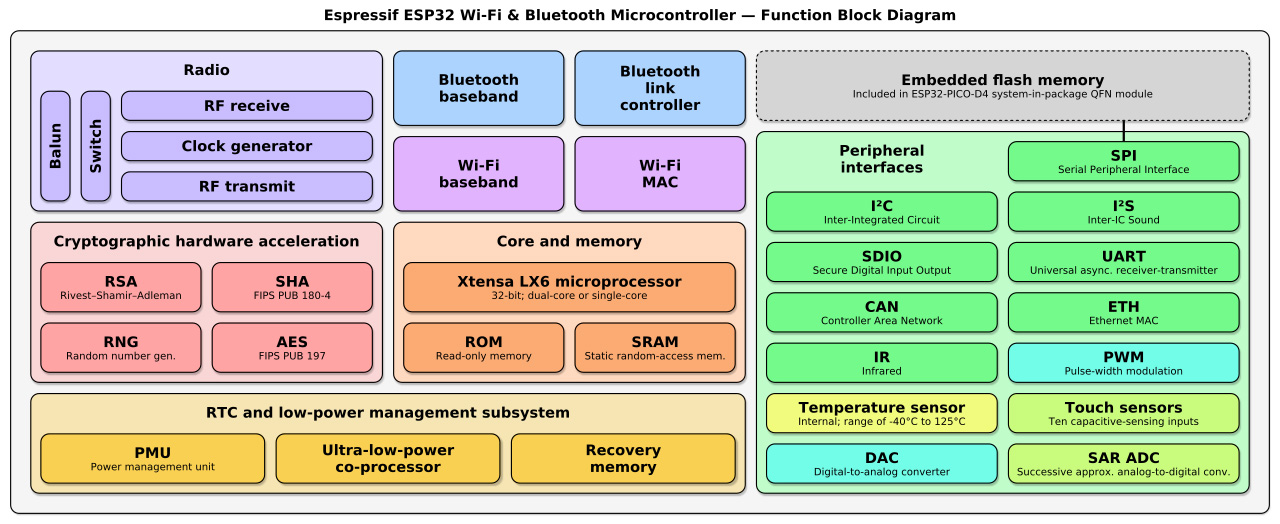
Penjelasan:
- CPU pada ESP32 tersebut adalah “Xtensa LX6 microprocessor”
Memori adalah ROM dan SRAM - Periferal adalah bagian-bagian lainnya, seperti Radio, Cryptographic, Peripheral Interfaces (I2C, SDIO, CAN, IR, Temperature Sensor, DAC, SPI, I2S, UART, ETH, PWM, Touch Sensor, SAR ADC)
Apa fungsi chip pada mikrokontroler?
Apakah Chip termasuk mikrokontroler?
Chip tidak termasuk mikrokontroler. Justru mikrokontroler adalah salah satu jenis chip. Chip jenis lain selain mikrokontroler banyak , misal chip penguat op-amp, chip rangkaian logika dan sebagainya.
Apa yang dimaksud dengan sistem minimum mikrokontroler?
Mikrokontroler secara definisi sudah dapat langsung dijalankan tanpa tambahan komponen mikroprosesor lain, jadi istilah ‘sistem minimum mikrokontroler’ ini agak rancu. Beberapa mikrokontroler sudah dapat dijalankan hanya dengan menambahkan tegangan power supply, namun ada juga beberapa mikrokontroler yang masih memerlukan tambahan komponen seperti kristal untuk clock.
Istilah ‘sistem minimum mikroprosesor’ sebenarnya dikenal untuk mikroprosesor, yaitu rangkaian minimum suatu sistem mikroprosesor (CPU, RAM dan periferal) yang dapat menjalankan suatu program sederhana.
Apa karakteristik mikrokontroler?
Karakteristik utama mikrokontroler adalah sebagai berikut
- mikrokontroler adalah komputer, di dalamnya ada CPU , memori dan periferal
- sering dipakai untuk mengendalikan perangkat-perangkat kecil
- dipakai di sistem tertanam (embedded systems), yaitu perangkat yang di dalamnya terdapat komputer namun komputer tersebut tidak kelihatan
- kemampuan komputasi terbatas, jadi umumnya hanya dipakai untuk komputasi ringan
- konsumsi daya mikrokontroler relatif kecil dibandingkan mikroprosesor biasa. terutama di perangkat yang mobile/mudah dipindahkan.
- Sering dipakai untuk menangani pekerjaan waktu nyata (pekerjaan yang memiliki batas waktu ketat)
- Sudah dilengkapi dengan periferal input & output jadi dapat langsung disambung ke sensor dan aktuator
- program pada mikrokontroler umumnya disimpan di flash memory, bukan di hard drive ataupun SSD
- harga relatif murah
- ukuran kecil, mudah diintegrasikan dengan produk lain
- Ukuran memori dan periferal pada mikrokontroler tidak dapat diubah, sehingga mikrokontroler diproduksi dengan berbagai kombinasi kemampuan memori dan periferal. Mikroprosesor dapat dikonfigurasi kemampuannya dengan menambah periferal, jadi jenis mikroprosesor tidak terlalu banyak.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}