Pada tulisan ini diuraikan contoh perancangan suatu sistem kendali motor dengan menggunakan mikrokontroler ATMega328 atau Arduino Nano.
Batasan masalahnya adalah sebagai berikut
- Input kecepatan (set point) menggunakan potensiometer analog.
- Kecepatan ditampilkan dengan 2 buah LED 7 segment. LED yang tersedia dalam konfigurasi common anode dan common cathode. Arus maksimum pada LED adalah 20 mA.
- Motor menggunakan motor DC 12 volt.
Komponen yang tersedia:
- mikrokontroler ATMega328 / Arduino Nano
- transistor BJT (NPN, PNP) & MOSFET (kanal P, kanal N).
- resistor, induktor, kapasitor , dioda, relay
- regulator DC
- batere 12 volt DC
- motor DC 12 volt
- rotary encoder 400 pulsa per putaran, output A dan B
- LED 7 segmen common cathode dan common anode
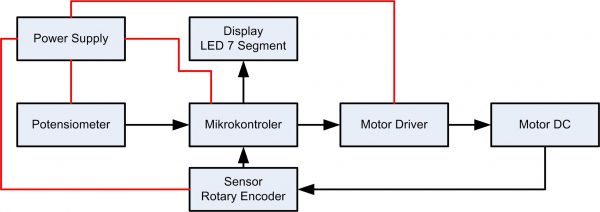
Blok Diagram Sistem
Berikut ini adalah blok diagram sistem kendali secara keseluruhan.
Analisis Kebutuhan Pin
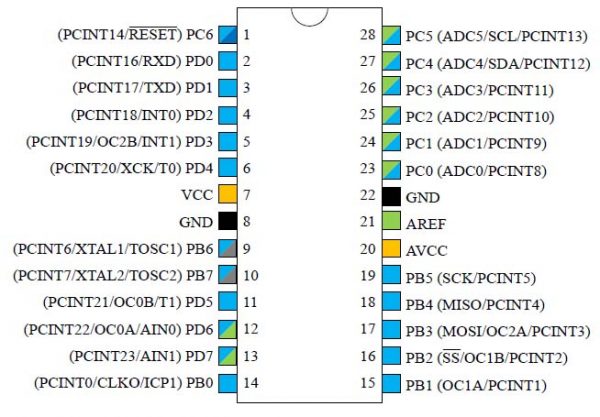
Pin pada mikrokontroler terbatas, jadi perlu dianalisis dulu apakah pin yang ada cukup. Jika tidak cukup, maka harus melakukan ekspansi port, atau menggunakan mikrokontroler lain yang pin lebih banyak.
Jumlah pin pada ATMega328 adalah 23 buah, jadi perlu dianalisis dulu apakah pin yang ada cukup untuk menyambungkan semua periferal. Dalam prakteknya, beberapa pin sudah dipakai untuk fungsi lain, jadi tidak tersedia, misalnya di Arduino Nano pin berikut sudah dipakai:
- PB6 & PB7 untuk kristal osilator
- PC6 untuk RESET
- PD0 untuk serial RX
- PD1 untuk serial TX
Jadi dalam praktisnya, yang tersedia adalah 18 pin.
Analisis alokasi pin:
Potensiometer memerlukan 1 input analog, untuk itu dapat menggunakan salah satu dari pin PC0 (ADC0) sampai PC5 (ADC5)
Rotary encoder memiliki 2 output, jadi perlu 2 pin digital untuk membaca data dari rotary encoder.
Motor agar dapat bergerak 2 arah memerlukan transistor yang dipasang dalam konfigurasi ‘H Bridge’. Pada sebuah H-Bridge terdapat 4 transistor, jadi memerlukan 4 pin digital untuk masing-masing transistor. Jumlah pin digital dapat dikurangi jika menggunakan rangkaian logika sehingga hanya diperlukan 2 pin saja: direction dan PWM. Namun pada soal hanya disediakan transistor, resistor dan sebagainya, jadi reduksi dari 4 pin menjadi 2 pin hanya boleh dilakukan dengan transistor.
LED 7 segment dapat menggunakan cara langsung: 1 pin ke 1 LED, atau bisa juga menggunakan multipleksing. Jika menggunakan cara langsung, maka diperlukan 14 pin digital untuk mengendalikan 2 buah LED 7 segment. Jika menggunakan multipleksing, maka diperlukan (7+2) pin digital.
Alternatif 1: motor dengan 4 pin, LED langsung
Alokasi pin:
- Potensiometer: 1 pin analog
- Rotary encoer: 2 pin digital
- Motor: 4 pin digital
- LED: 14 pin
Total pin: 21 , jadi konfigurasi ini dapat dibuat.
Alternatif 2: motor dengan 4 pin, LED dengan multipleksing.
- Potensiometer: 1 pin analog
- Rotary encoer: 2 pin digital
- Motor: 4 pin digital
- LED: 9 pin
Total pin: 16 , jadi konfigurasi ini dapat dibuat.
Alternatif 3: motor dengan 2 pin, LED dengan multipleksing.
- Potensiometer: 1 pin analog
- Rotary encoder: 2 pin digital
- Motor: 2 pin digital
- LED: 9 pin
Total pin: 14 , jadi konfigurasi ini dapat dibuat.
Rangkaian Potensiometer
Potensiometer dipakai sebagai pembagi tegangan. Tegangan output (Vout) akan dapat dipakai untuk mengetahui sudut putaran potensiometer. Perlu diperhatikan bahwa Vin harus <= 5 volt, supaya Vout juga <= 5 volt. Jika Vout melebihi 5 volt, maka dapat merusak mikrokontroler yang bekerja pada 5 volt.
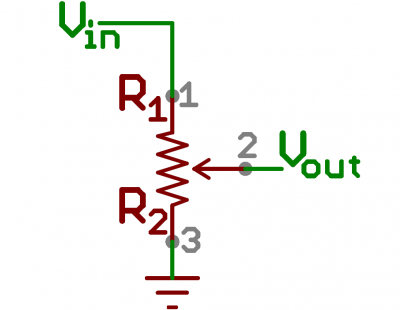
Vout dihubungkan ke salah satu pin analog input pada ATMega328.
Referensi:
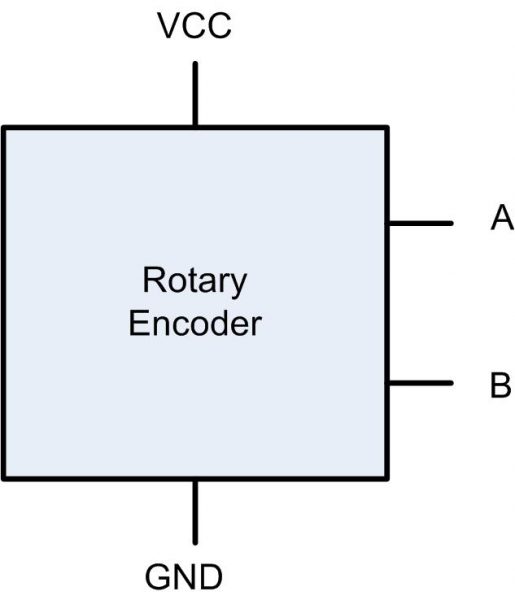
Rangkaian Rotary Encoder
Rotary encoder memerlukan koneksi ke GND , tegangan supply VCC, dan ada output A dan B. VCC dapat dihubungkan ke tegangan 5 volt. Detailnya disesuaikan dengan datasheet dari rotary encoder tersebut. Output A dan B dihubungkan ke input digital di mikrokontroler.
Pin yang dipilih di mikrokontroler tergantung dari metode pembacaan input yang dipakai, ada beberapa cara:
- menggunakan interupsi eksternal, maka perlu menggunakan pin INT0 (PD2) dan INT1 (PD3)
- menggunakan interupsi PCINT, maka dapat menggunakan input digital mana saja.
- menggunakan sampling dengan timer, maka dapat menggunakan input digital mana saja.
Rangkaian Motor DC
Sinyal output dari mikrokontroler hanya maksimal arus 40 mA dengan tegangan 5 volt, jadi tidak cukup untuk menggerakkan motor. Cara yang paling umum untuk menyambungkan motor DC ke mikrokontroler adalah menggunakan rangkaian ‘H Bridge’, dengan rangkaian ini motor dapat dikendalikan maju mundur.
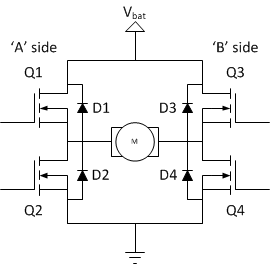
Pada H-Bridge juga dipasang dioda pengaman (D1 , D2, D3, D4) untuk mengamankan arus yang timbul karena induktansi motor. Rangkaian ini memerlukan 4 output digital dari mikrokontroler.
H-Bridge menggunakan teknik PWM (Pulse Width Modulation) untuk mengatur energi yang diberikan ke motor DC, dan dengan demikian dapat mengatur kecepatan motor. Arah putaran motor juga dapat diatur dengan mengatur kombinasi transistor yang aktif.
Selain menggunakan H-Bridge , antar muka ke motor DC dapat juga menggunakan teknik berikut:
- Output analog dari mikrokontroler, diperkuat dengan penguat / amplifier. Cara ini secara teoritis dapat dilakukan, namun dalam praktek jarang digunakan karena efisiensi penguat analog tidak setinggi teknik PWM.
- Relay, namun masalahnya relay mempunya kecepatan yang lambat, sehingga tidak cocok untuk teknik PWM.
H-Bridge tersedia dalam bentuk modul yang sudah jadi, di dalamnya sudah ada transistor power dan antar muka dari mikroprosesor (CMOS/TTL) ke transistor tersebut, sehingga sangat mudah dihubungkan ke mikroprosesor. Contoh modul tersebut adalah di antaranya Toshiba TB6612FNG dan Infineon TLE 5025-2
|
|
|

Referensi
Rangkaian LED 7 Segment
Cara 1: tanpa multipleksing. Setiap LED di 7 Segment dihubungkan ke output mikrokontroler. Cara ini memerlukan 14 pin output digital di mikrokontroler, namun memudahkan pemrograman karena tidak perlu melakukan update rutin.
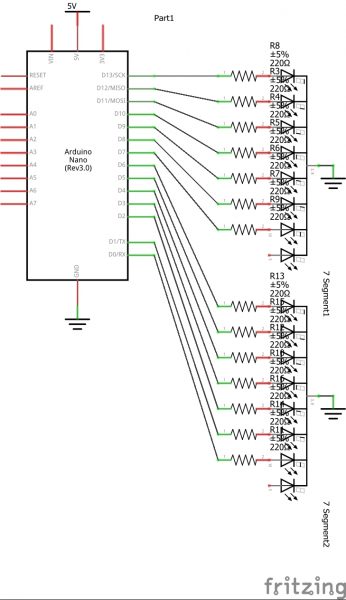
Cara 2: dengan multipleksing. LED 7 Segment dapat dihubungkan dengan menggunakan multipleksing seperti rangkaian berikut ini:
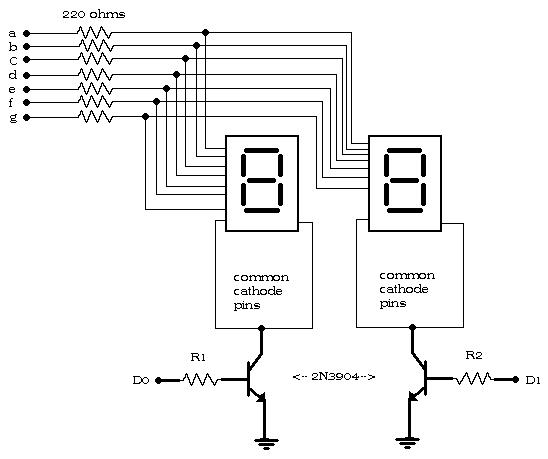
Teknik multipleksing ini hanya memerlukan 9 pin digital output, namun memerlukan software yang lebih kompleks.
Perhitungan nilai resistor seri LED
- Asumsi tegangan drop pada LED adalah 2 volt.
- Tegangan pada resistor adalah 3 volt.
- Arus dibatasi di 20 mA
- Nilai resistor = R = V/I = 3 volt / 20 mA = 150 ohm. Jadi nilai resistor sekurang-kurangnya adalah 150 ohm. Untuk itu resistor untuk LEd dapat menggunakan 220 ohm.
Perhitungan nilai resistor basis transistor (R1 dan R2)
- Asumsi penguatan arus transistor = 100. Angka ini normal untuk transistor sinyal kecil.
- Asumsi Vbe = 0.7 volt
- Arus total LED 1 digit= 20 mA x 7 = 140 mA
- Arus kolektor transistor = 140 mA
- Arus basis minimal = 20 mA / 100 = 1,4 mA
- Tegangan pada R1 = 5-0.7 = 4.3 volt
- R = V/I = 4.3 / 1,4 mA = 3071 ohm. Jadi nilai R paling besar adalah 3071 ohm. Untuk itu R1 dan R2 bisa menggunakan nilai 1000 ohm yang mudah didapat.
Referensi:
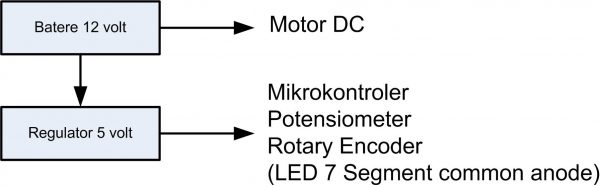
Rangkaian Sumber Daya
Sumber daya yang tersedia hanya 12 volt, sedangkan rangkaian memerlukan 12 volt (motor) dan 5 volt (lainnya). Untuk itu diperlukan regulator yang sesuai, misal regulator 7805 yang dapat mengubah input 12 volt menjadi output 5 volt.
Potensiometer memerlukan tegangan 5 volt untuk Vin. Jika menggunakan 12 volt, maka Vout juga dapat mencapai 12 volt, sehingga dapat merusak mikrokontroler.
Motor DC memerlukan 12 volt, sehingga tegangan 12 volt dapat langsung disambung ke rangkaian motor driver.
Mikrokontroler ATMega328 memerlukan VCC 5 volt, sehingga memerlukan regulator 5 volt.
Rotary encoder memerlukan tegangan 5 volt, sehingga memerlukan regulator 5 volt.
LED 7 Segment jika common cathode tidak terhubung ke VCC, sehingga tidak perlu sambungan ke sumber daya. Jika menggunakan common anode, maka bagian common (anode) dihubungkan ke output regulator 5 volt. Perlu berhati-hati menghubungkan LED ke 12 volt, karena kalau salah , maka akan ada tegangan 12 volt masuk ke pin mikrokontroler, sehingga dapat merusak mikrokontroler.
Skema Rangkaian Lengkap
[under construction]
Penentuan Frekuensi Sampling
Frekuensi sampling ditentukan dari bandwidth sistem yang dikendalikan. Sesuai dengan kriteria Nyquist, frekuensi sampling adalah 2x frekuensi maksimum sistem. Pada persoalan ini nilai frekuensi sistem belum diketahui, namun dapat dihitung dengan mengetahui parameter sistem (Gc(s) dan Gp(s), ataupun dapat juga diukur dengan memperhatikan respon sistem terhadap sinyal input step.
Interupsi pada Perangkat Lunak
Berikut ini beberapa bagian pada sistem kendali ini yang memerlukan interupsi:
- Algoritma sistem kendali digital memerlukan suatu frekuensi sampling tertentu. Untuk mendapatkan frekuensi sampling ini perlu interupsi TIMER.
- Rotary encoder untuk pembacaan input menggunakan interupsi eksternal (INT0,INT1), atau PCINT, agar setiap transisi dari output rotary encoder menghasilkan interupsi pada mikrokontroler
- Rotary encoder memerlukan interupsi TIMER, untuk dapat menghitung kecepatan, berdasarkan jumlah pulsa yang timbul dan waktu yang sudah berlalu.
- LED 7 Segment memerlukan interupsi jika menggunakan konfigurasi multipleksing. Jika tidak menggunakan multipleksing, maka tidak memerlukan interupsi untuk update display.
- Potensiometer tidak memerlukan interupsi secara langsung, namun perlu disampling sesuai dengan frekuensi sampling sistem kendali.
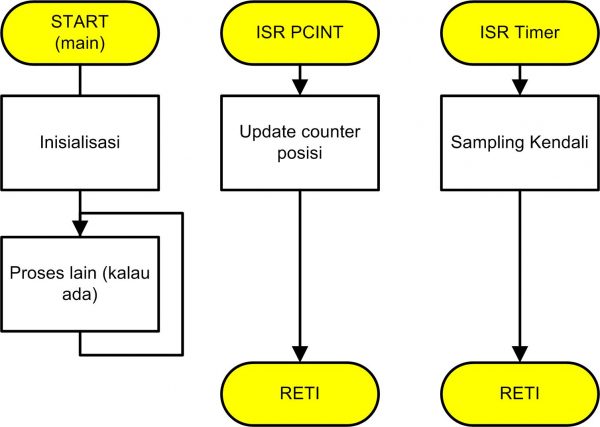
Diagram Alir Perangkat Lunak
Detail diagram alir (flowchart) tergantung dari konsep software yang dipakai. Berikut ini salah satu desain:
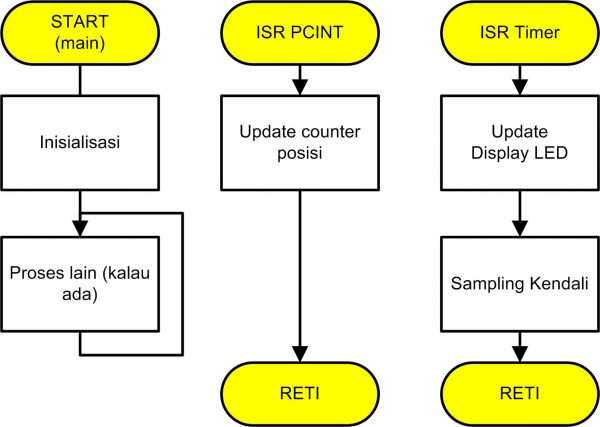
Penjelasan:
Rotary encoder menggunakan interupsi PCINT. Tiap kali ada transisi/perubahan di output A ataupun B, maka akan timbul interupsi. Dari sinyal ini dapat diketahui motor bergerak maju atau mundur. Angka posisi ini diakumulasikan oleh blok ‘Update counter posisi’
LED 7 Segment perlu update rutin jika menggunakan teknik multipleksing. Update ini ditangani oleh ‘Update Display LED’ yang dipanggil oleh interupsi TIMER.
Algoritma kendali digital memerlukan sampling secara rutin, untuk itu memerlukan interupsi TIMER secara teratur. Fungsi ini ditangani oleh blok ‘Sampling Kendali’.
Hal yang dikerjakan oleh blok ‘Sampling Kendali’ adalah sebagai berikut:
- membaca posisi potensiometer berdasarkan tegangan analog yang masuk dari potensiometer ke ADC
- menghitung posisi / kecepatan motor saat ini, berdasarkan angka counter posisi saat ini dan angka counter posisi sebelumnya.
- melakukan perhitungan algoritma kendali, misalnya dengan menggunakan teknik PID (Proporsional, Integral, Derivative)
- mengirimkan sinyal kendali hasil perhitungan dengan menggunakan output PWM dan Direction ke motor driver.
Jika display LED menggunakan teknik langsung tanpa multipleksing, maka flowchart dapat dimodifikasi sebagai berikut: