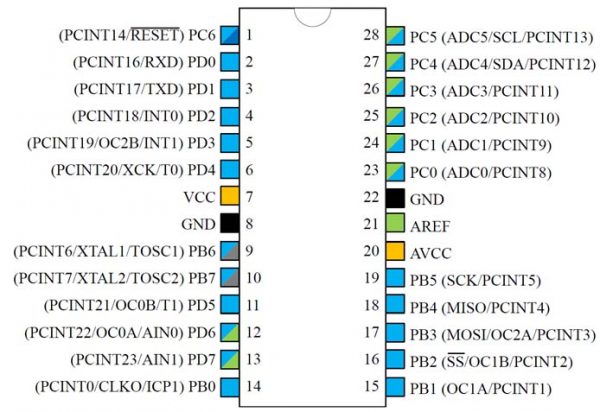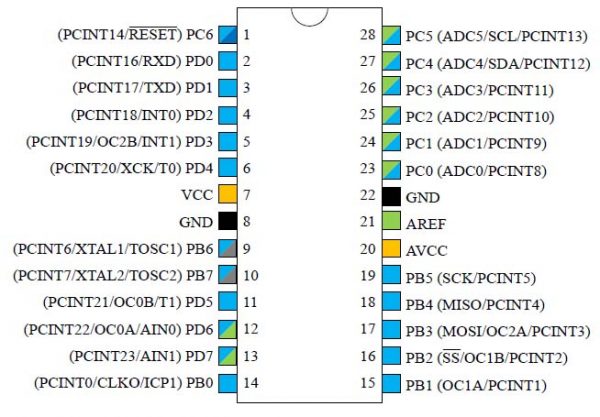
Saat ini mikroprosesor sudah tersedia dalam bentuk mikrokontroler seperti ATmega328 yang sudah mengintegrasikan CPU, memori dan periferal input output di dalamnya. Akibatnya untuk membuat suatu sistem mikroprosesor tidak lagi diperlukan banyak komponen pendukung lain. Mikrokontroler ini masih memerlukan kristal, power supply dan beberapa komponen lain.
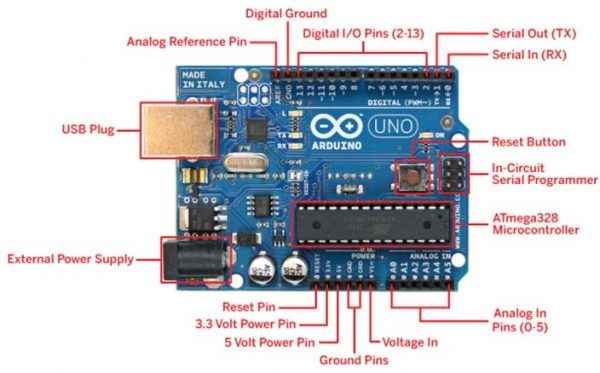
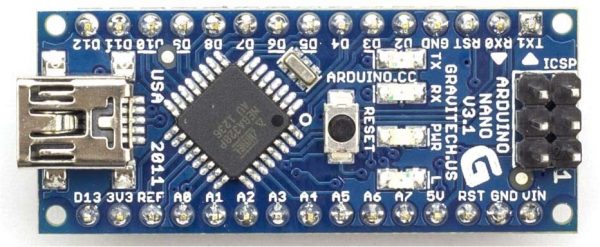
Selain itu juga banyak yang sudah tersedia dalam bentuk modul, seperti Arduino UNO, Arduino Nano, Blue Pill dan sebagainya. Pada modul seperti ini, kita dapat menjalankan sistem mikroprosesor tersebut cukup hanya dengan menambahkan catu daya USB saja.
Namun demikian, kadang-kadang fasilitas yang disediakan oleh mikrokontroler ataupun modul tersebut masih kurang, sehingga masih diperlukan tambahan komponen pendukung. Berikut ini beberapa komponen pendukung yang sering dipakai.
Mikroprosesor / CPU
Komponen utama suatu sistem mikroprosesor adalah sebuah CPU (Central Processing Unit). CPU ini belum dilengkapi dengan memori, sehingga untuk dapat dijalankan sebagai sistem minimum, CPU ini masih perlu ditambah memori RAM dan EEPROM. Berikut ini keluarga CPU yang (dulu) populer di Indonesia:
- Keluarga Z80 buatan Zilog
- Keluarga 6800 buatan Motorola

Pada saat ini penggunaan CPU sudah jarang, biasanya kita menggunakan mikrokontroler yang lebih praktis.
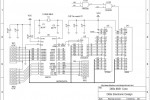
Berikut ini contoh rangkaian mikroprosesor berbasis CPU tipe 6802, dari keluarga 6800 buatan Motorola. (https://www.sbprojects.net/projects/nano6802/index.php)
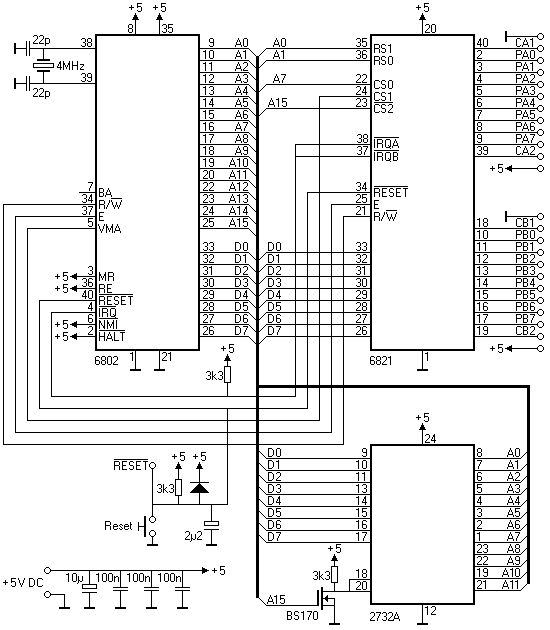
Pada rangkaian tersebut, komponen utamanya adalah sebagai berikut:
- 6802 sebagai CPU
- 2732A sebagai EPROM
- 6821 sebagai antar muka digital
Pada rangkaian tersebut tidak ada SRAM, karena di dalam 6802 sudah ada RAM sebanyak 128 byte.
Sumber Clock
Mikroprosesor yang kita pakai sekarang umumnya termasuk ke dalam sistem digital sinkron sekuensial, sehingga suatu mikroprosesor memerlukan clock. Sumber clock yang umum digunakan adalah osilator internal menggunakan resistor dan kapasitor, serta bisa juga menggunakan kristal. Rangkaian osilator dengan resistor dan kapasitor sangat sederhana, namun kurang teliti. Kristal menghasilkan clock yang lebih teliti. Jika diperlukan ketelitian waktu yang lebih tinggi, dapat dilihat di artikel “Sumber Clock pada Rangkaian Elektronik“

RAM
RAM (Random Access Memori) fungsinya sebagai memori yang dapat dibaca dan ditulis oleh mikroprosesor.
Salah satu jenis static RAM yang populer dipakai adalah tipe 6264. RAM ini berkapasitas 8 kilobyte (8192 byte).
Mikrokontroler versi terbaru umumnya sudah dilengkapi RAM di dalamnya, sehingga kita tidak perlu menambahkan RAM lagi.
Selain static RAM (SRAM), ada juga dynamic RAM (DRAM). DRAM lebih murah dibandingkan SRAM, namun rangkaiannya lebih kompleks. DRAM populer digunakan pada mikroprosesor yang memerlukan RAM besar.
Lebih jauh tentang RAM dan memori sejenisnya dapat dilihat di artikel “Memori pada Sistem Mikroprosesor“
EPROM
EPROM atau Erasable Programmable Read Only Memory, adalah memori yang dapat diprogram dengan menggunakan perangkat programmer, dan dapat dihapus dengan menggunakan cahaya ultraviolet.
EPROM yang populer digunakan adalah tipe 27C64. EPROM ini berkapasitas 8 kilobyte (8192 byte)

Input Output Digital Mikroprosesor
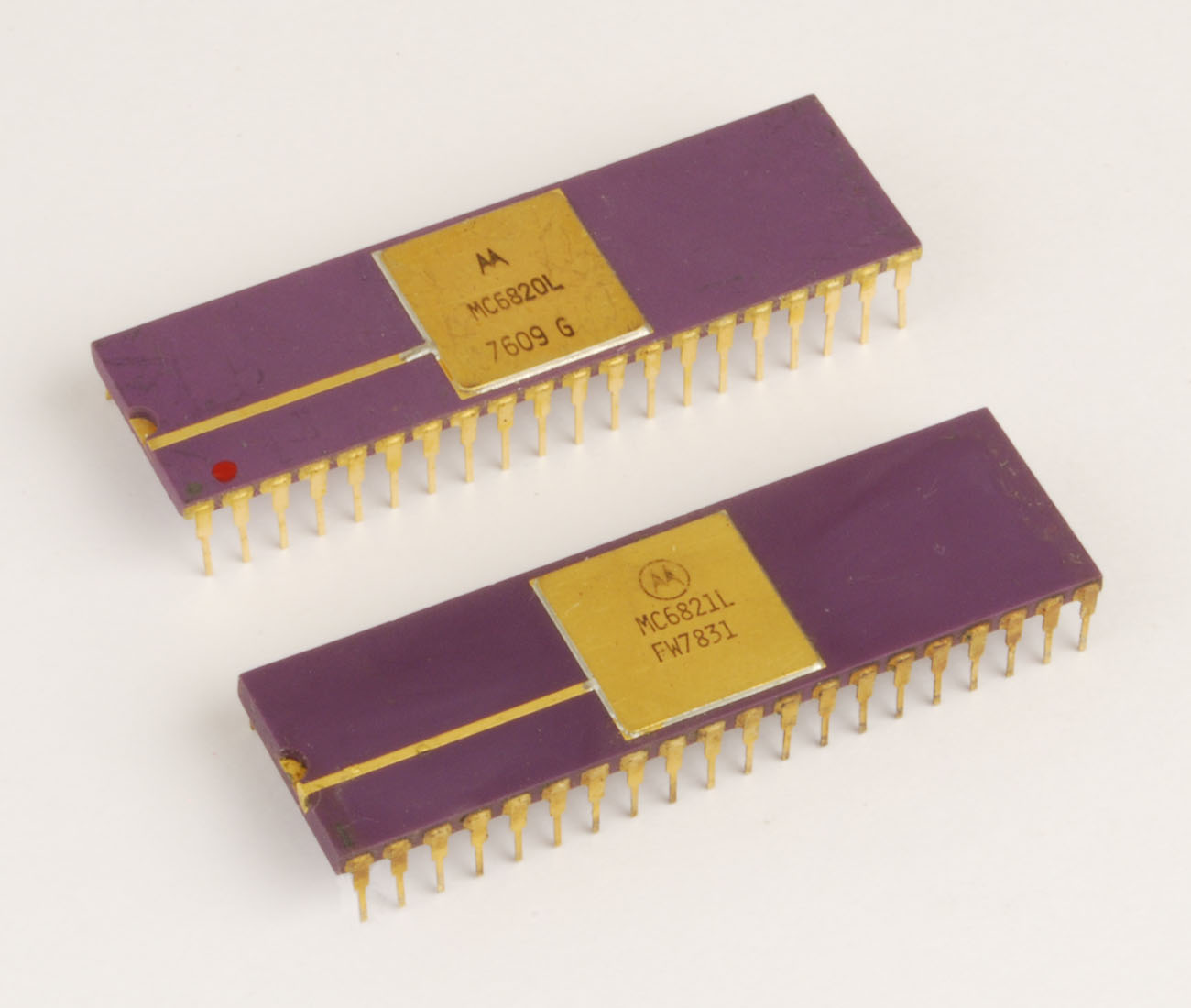
Untuk antar muka digital dari bus di dalam sistem mikroprosesor ke luar, diperlukan komponen antar muka digital. Komponen yang populer dipakai adalah IC PPI (Programmable Peripheral Interface) tipe 8255 buatan Intel dan 6821 dari Motorola.
Berikut ini PPI 8255 yang sering dipakai bersama mikroprosesor keluaran Intel, seperti 8088 dan 8086
Berikut ini IC Peripheral Interface Adapter (PIA) model MC6820 dan MC6821. Keduanya sering dipakai bersama mikroprosesor keluaran Motorola, seperti 6802 dan 6805.
Fungsi input output digital dari bus mikroprosesor juga dapat dilakukan dengan komponen IC digital berikut ini
- 74HC373 latch 8 bit
- 74HC573 latch 8 bit
Referensi:
- https://en.wikipedia.org/wiki/Peripheral_Interface_Adapter
- https://en.wikipedia.org/wiki/Parallel_Peripheral_Interface
Bus Mikroprosesor
Pada mikroprosesor model lama seperti Z80 dan Motorola 6800, masih diperlukan komponen register pada bus mikroprosesor. Pada mikrokontroler model baru seperti ATmega328 dan ESP32, bus mikroprosesor sudah built-in, jadi tidak perlu diutak atik lagi oleh pendesain sistem.
Komponen yang dipakai pada bus antara lain sebagai berikut:
- 74HC138 Multiplexer, sebagai address decoder
- 74HC245 buffer 2 arah 8 bit, sebagai input output digital , ataupun bus driver
- 74HC573 latch 8 bit, sebagai bus multiplexer
Input Digital
Mikrokontroler zaman sekarang sudah memiliki input output digital built-in, sehingga tidak memerlukan tambahan PPI atau PIA. Namun kadang perlu komponen tambahan untuk menambah jumlah port, ataupun untuk konversi tegangan.
Berikut ini beberapa komponen yang umum dipakai pada sistem mikroprosesor untuk menambah kemampuan input digital:
- 74HC164 serial input parallel output shift register tanpa output latch, dipakai untuk menambah jumlah port output
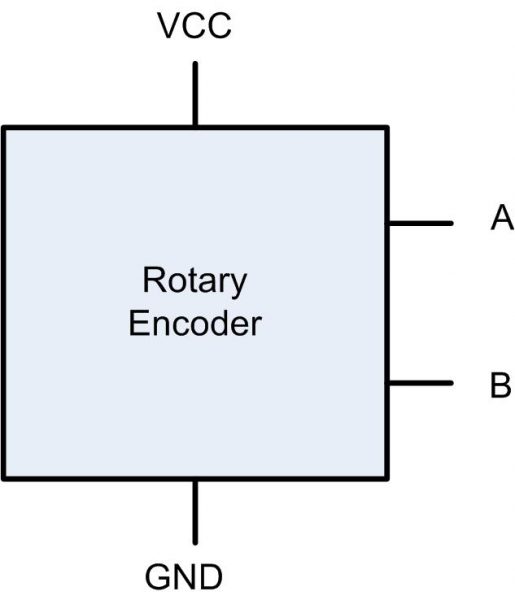
- 74HC165 parallel input serial output shift register, dipakai untuk menambah jumlah port input
- PCF8574 untuk menambah jumlah port input output , antar muka ke mikrokontroler menggunakan protokol I2C
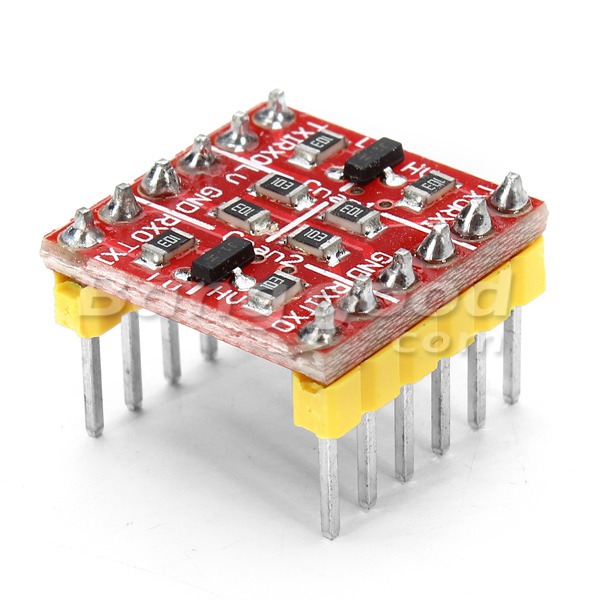
- Level Converter jika tegangan input dari sensor/transduser tidak sama dengan tegangan input mikrokontroler. Detail dibahas di artikel “Teknik Input Digital“. Salah satu cara yang praktis dengan menggunakan bidirectional logic level converter.
Output Digital
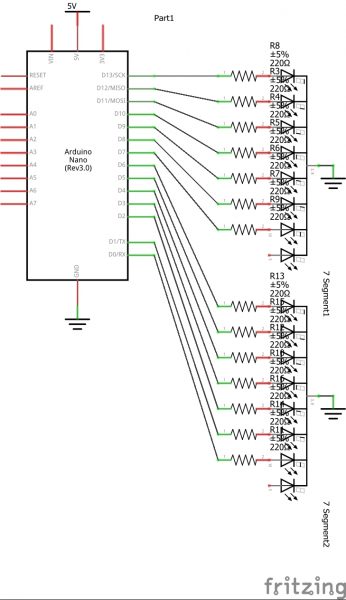
Berikut ini beberapa komponen yang umum dipakai pada sistem mikroprosesor untuk menambah output digital:
- 74HC595 serial input parallel output shift register dengan output latch, dipakai untuk menambah jumlah port output
- PCF8574 untuk menambah jumlah port input output , antar muka ke mikrokontroler menggunakan protokol I2C
Output digital dari mikrokontroler juga kadang-kadang perlu diperkuat arusnya, ataupun diubah tegangannya. Berikut ini beberapa komponen yang sering dipakai:
- ULN2803 Darlington driver, untuk memperkuat arus dari port mikroprosesor, dapat menangani arus sampai 500 mA
- Digital Level Converter jika tegangan output mikrokontroler tidak sama dengan tegangan perangkat yang dikendalikan. Salah satu cara yang praktis dengan menggunakan modul bidirectional logic level converter.
- Transistor NPN, PNP, MOSFET kanal N, kanal P sebagai penguat arus. Dibahas detail di artikel “Teknik Output Digital“
Referensi
- https://www.ti.com/product/PCF8574
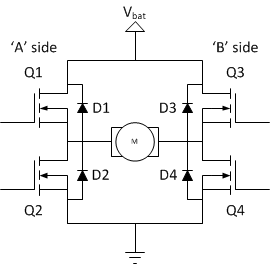
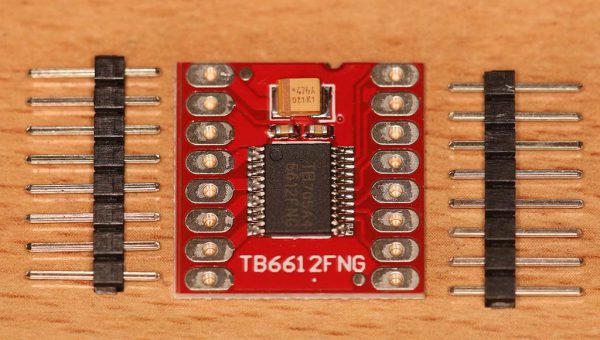
Penguat Output Dengan H-Bridge
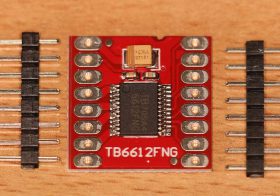
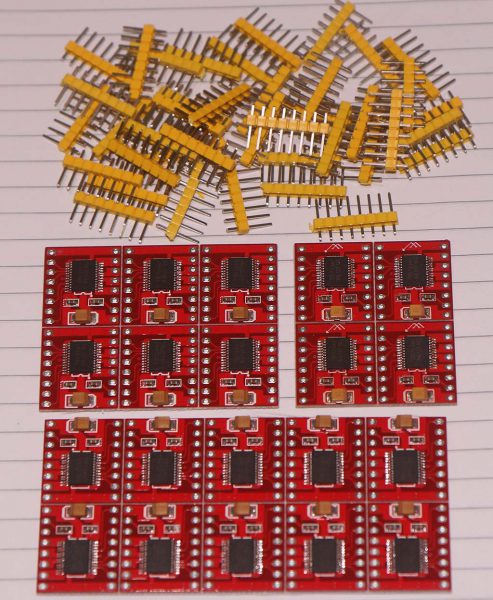
H-Bridge adalah rangkaian output khusus untuk menggerakkan motor DC dengan 2 arah. Pada umumnya komponen utamanya adalah 4 buah transistor BJT/MOSFET yang dapat dikonfigurasikan sehingga polaritas output dapat dibalik.
Contoh komponen H-Bridge:
Input Analog
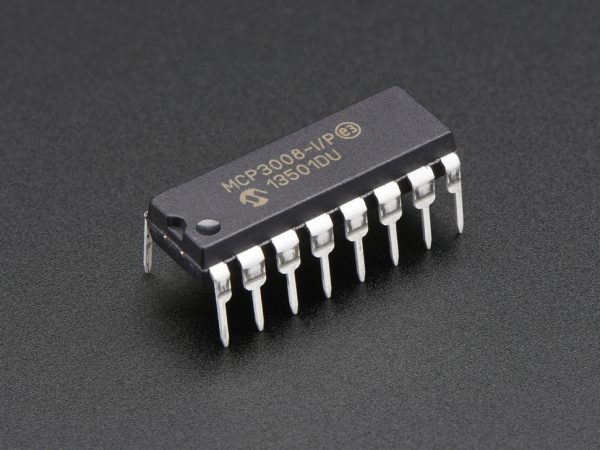
Untuk input analog diperlukan ADC (Analog to Digital Converter). Pada mikrokontroler seperti ATmega328 sudah dilengkapi ADC. Jika ADC ini tidak cukup , atau mikrokontroler tidak ada ADC, maka kita perlu menambah ADC eksternal.
Contoh ADC yang mudah dipakai untuk mikrokontroler:
- MCP3008: 8 kanal 10 bit, antar muka SPI
- ADS1115: 4 kanal 16 bit, antar muka I2C
- HX711: 2 kanal 24 bit, antar muka serial digital. Umumnya dipakai untuk timbangan digital.
- AD7705
- MAX174
- ADS1256
- ADC0804
- PCF8591
- ADS1232
ADC dibahas secara lebih detail di artikel “ADC untuk Arduino“
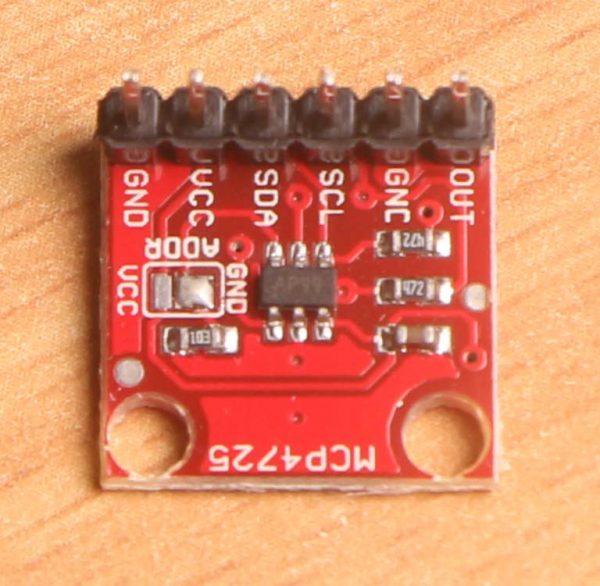
Output Analog
Untuk output analog diperlukan DAC (Digital to Analog to Converter). Mikrokontroler seperti ESP32 sudah dilengkapi DAC 8 bit, namun umumnya mikrokontroler tidak dilengkapi DAC.
Contoh DAC yang sering dipakai:
- MCP4725
- DAC0804
Komunikasi Digital
Komunikasi digital ke periferal sering menggunakan protokol I2C ataupun SPI. Namun jika level tegangan dengan periferal berbeda, maka perlu tambahan komponen bidirectional logic converter.
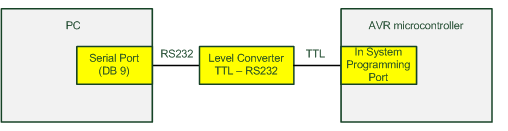
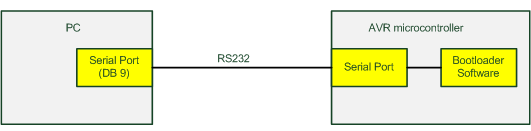
Mikrokontroler umumnya memiliki port komunikasi serial asinkron dengan level tegangan 3,3 volt ataupun 5 volt, sesuai dengan tegangan kerja mikrokontroler tersebut. Supaya dapat dihubungkan dengan perangkat lain yang menggunakan level tegangan RS232, perlu ada konverter TTL ke RS232, seperti MAX232
Jika komunikasi menggunakan RS-485, maka perlu mengubah level tegangan TTL menjadi RS-485 dengan komponen seperti MAX485.
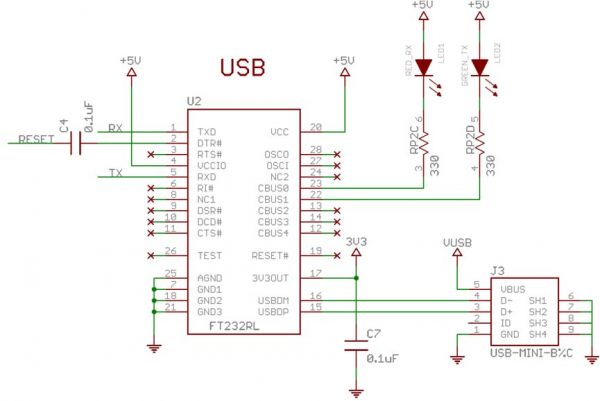
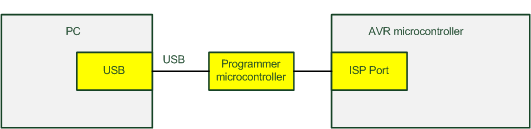
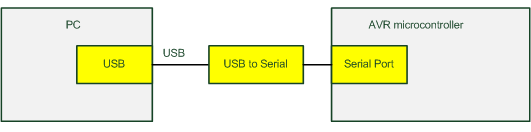
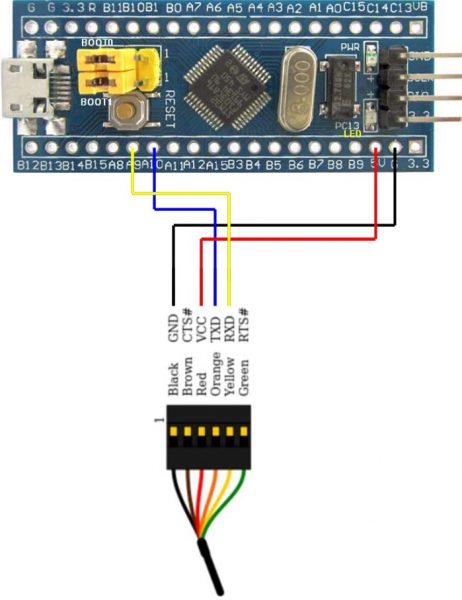
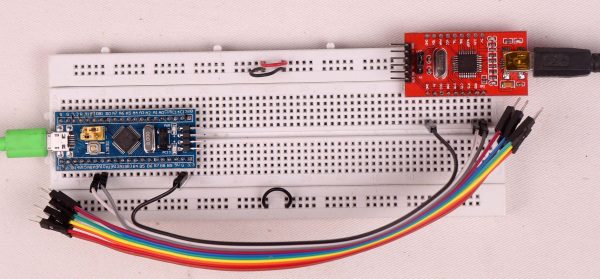
Jika ingin menghubungkan port komunikasi asinkron dengan port USB di komputer, maka perlu menggunakan modul USB to Serial. Modul USB to serial yang populer adalah yang berbasis chipset FTDI dan chipset CH340

Regulator DC
Jika tegangan dari power supply/baterai tidak sama dengan tegangan kerja mikrokontroler, maka perlu ditambahkan regulator yang sesuai.
Regulator yang umum dipakai adalah dari tipe linear dan tipe switching.
Contoh regulator linear yang umum:
- LM7805
- LM317

Contol regulator step down DC to DC converter adalah LM2596. IC ini sudah tersedia dalam bentuk modul, sehingga tidak perlu dirakit lagi dari komponen diskrit.

Jika diinginkan konversi energi yang lebih efisien, lebih baik menggunakan DC to DC converter. Saat ini sudah banyak dijual berbagai macam modul DC to DC converter.
Contoh komponen DC to DC konverter dibahas di artikel “Cara menurunkan tegangan aki 12 volt ke 6 volt“
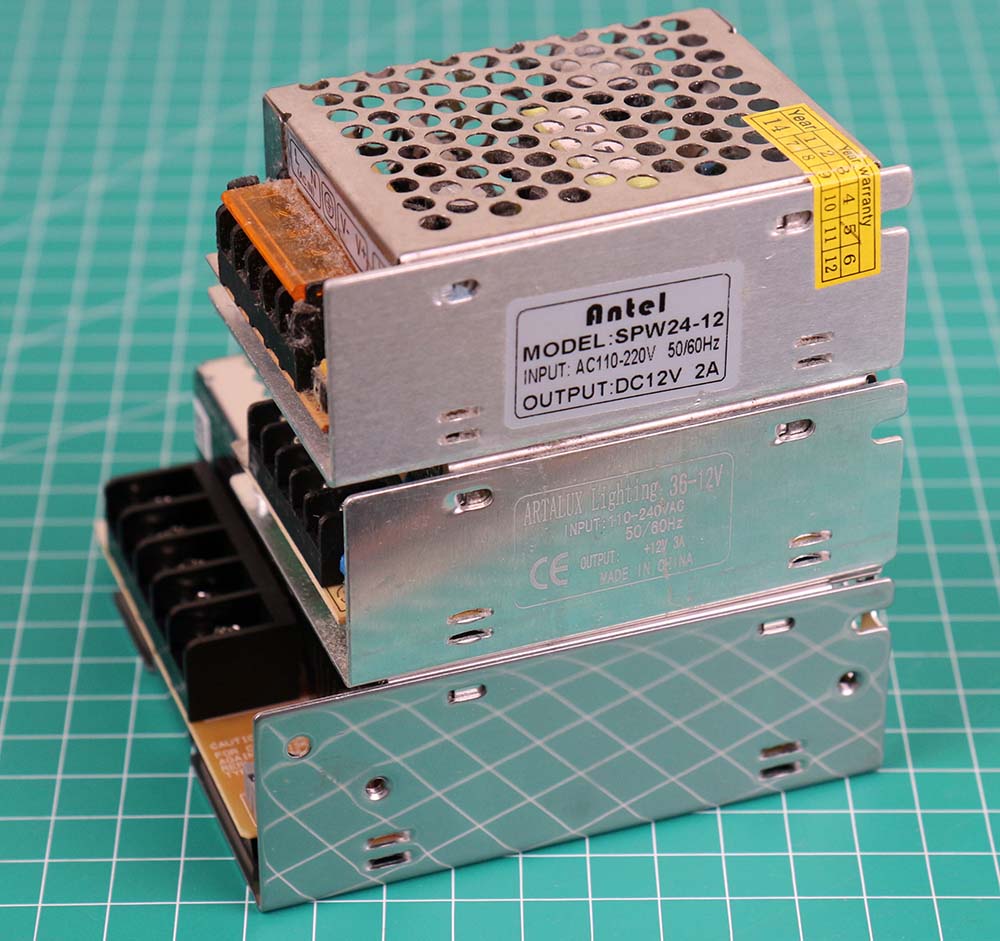
Power Supply
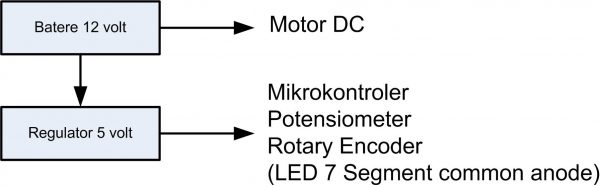
Power supply / adaptor diperlukan untuk mengubah tegangan jala-jala listrik 220 volt menjadi tegangan rendah yang dapat dipakai untuk mikroprosesor. Umumnya mikroproser memerlukan tegangan 5 volt DC, namun kadang ada juga perangkat seperti motor DC yang memerlukan tegangan 12 volt DC.
Jika memerlukan beberapa tegangan, dapat dipakai beberapa power supply, atau 1 power supply ditambah dengan regulator untuk mengubah tegangan output ke tegangan lain yang diinginkan. Misal jika diperlukan tegangan 12 volt dan 5 volt, bisa saja dipakai 1 power supply dengan output 12 volt DC dan ditambah regulator DC to DC converter step down 12 volt ke 5 volt DC.

Power supply yang hemat energi adalah dari tipe switching power supply, misal power supply 12 volt berikut ini.
Baterai
Jika perangkat dirancang untuk mobile atau tidak ada akses ke jala-jala listrik, maka perlu sumber daya internal berupa baterai. Alternatif lain menggunakan sel surya plus baterai.

Tegangan baterai jarang yang sesuai dengan tegangan kerja mikroprosesor. Tegangan baterai juga berubah (menurun) tergantung kapasitas baterai yang terpakai. Untuk menjaga tegangan supply yang konstan, biasanya output dari baterai ini perlu disambungkan ke regulator atau DC to DC converter.
Komponen lain yang diperlukan namun belum dibahas di artikel ini:
- LED (Light Emitting Diode) untuk display dan indikator
- Sakelar / keypad untuk input
- Display dengan tampilan LCD
- Casing seperti durabox
- Aksesoris casing seperti cable gland
- Buzzer dan speaker
- Sensor-sensor
- PCB (Printed Circuit Board)
- Terminal untuk dipasang di PCB
- Komponen pasif seperti resistor,kapasitor, induktor
Referensi
- Texas Instruments: Datasheet 74HC164
- Texas Instruments: Datasheet 74HC165
- Texas Instruments: Datasheet PCF8574
- Texas Instruments: Datasheet 74HC595
- Texas Instruments: Datasheet ULN2803
- Datasheet LM2596