Berikut ini beberapa tajuk yang dapat diajarkan di kelas sistem embedded.
Embedded: – mengukur memory usage di stack – apa yang terjadi kalau stack terlalu kecil pada sebuah task – apa yang terjadi jika suatu resource diakses bersamaan oleh beberapa buah task
Tools pada pengembangan sistem embedded – GIT: source control – Unit Testing
Tajuk advanced: – keamanan sistem embedded – kriptografi sederhana – machine learning & sistem embedded
Tugas Perancangan: – metodologi desain – pemodelan sistem – multi tasking – benchmark komputasi di PC dan di mikrokontroler – pengujian algoritma di PC dan mikrokontroler
ada beberapa pengertian impedansi, yg saya ingat 3:
impedansi listrik pada rangkaian listrik, misal resistor + kapasitor + induktor yg dibuat menjadi suatu rangkaian. impedansi ini adalah perbandingan arus & tegangan pada komponen tersebut.
impedansi saluran transmisi, misal pada kabel koaksial, kabel twisted pair. impedansi ini adalah perbandinga L dan C pada kabel tersebut. impedansi ini dikenal juga sebagai ‘impedansi karakteristik’
impedansi pada gelombang elektromagnetik, ini adalah perbandingan kuat medan listrik & medan magnet. impedansi ini dikenal juga sebagai ‘wave impedance’.
Berikut ini uraian istilah Cyber Physical System atau “Sistem Fisik Siber” menurut bahasa atau arti kata. Definisi dalam dunia engineering dapat dibaca di artikel “Pengertian Cyber Physical System“
Konsep Cyber Physical System (https://ptolemy.berkeley.edu/projects/cps/)
Definisi “Cyber”:
of, relating to, or involving computers or computer networks (such as the Internet)
Berikut ini foto-foto percobaan pengukuran kecepatan putaran menggunakan motor DC kecil.
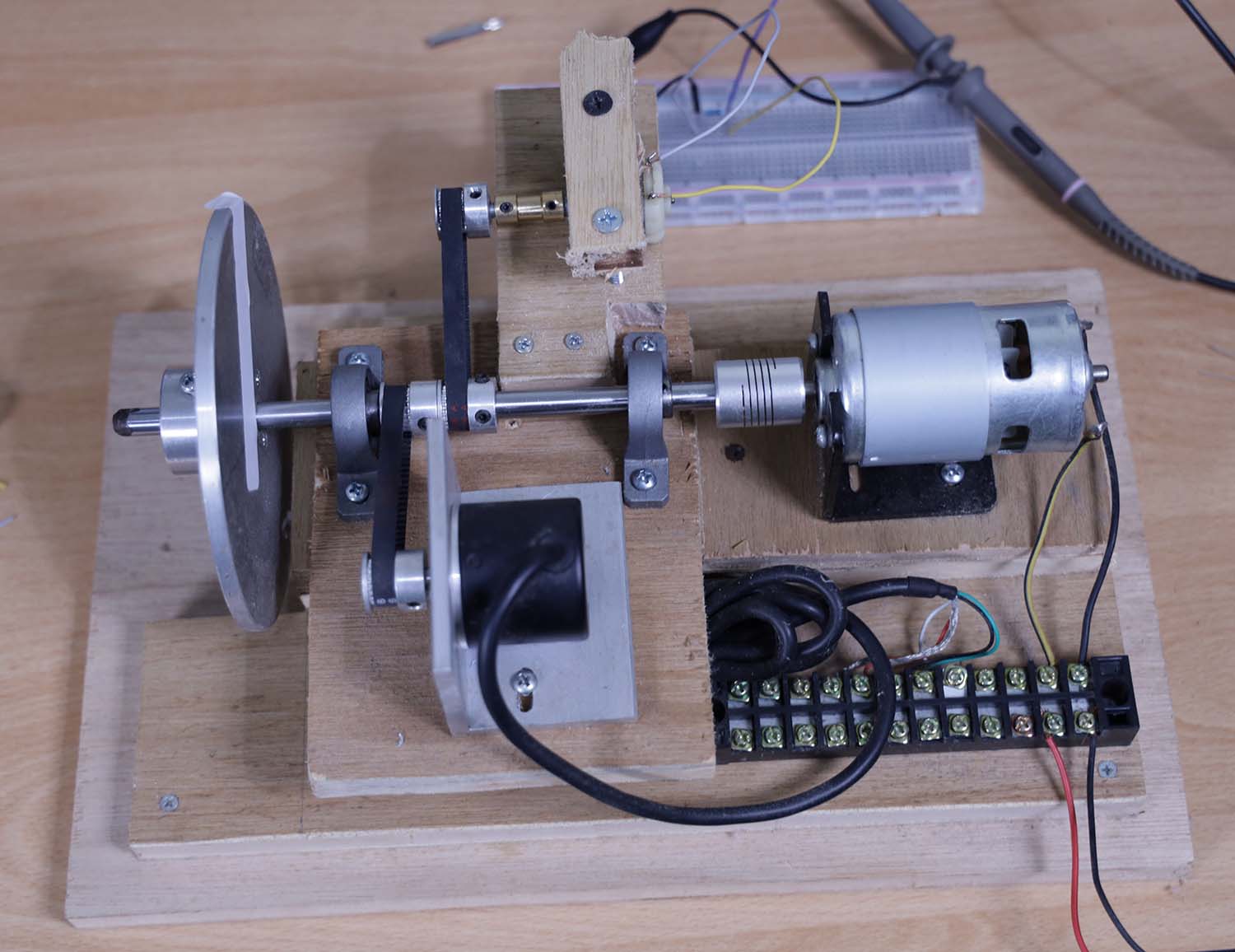
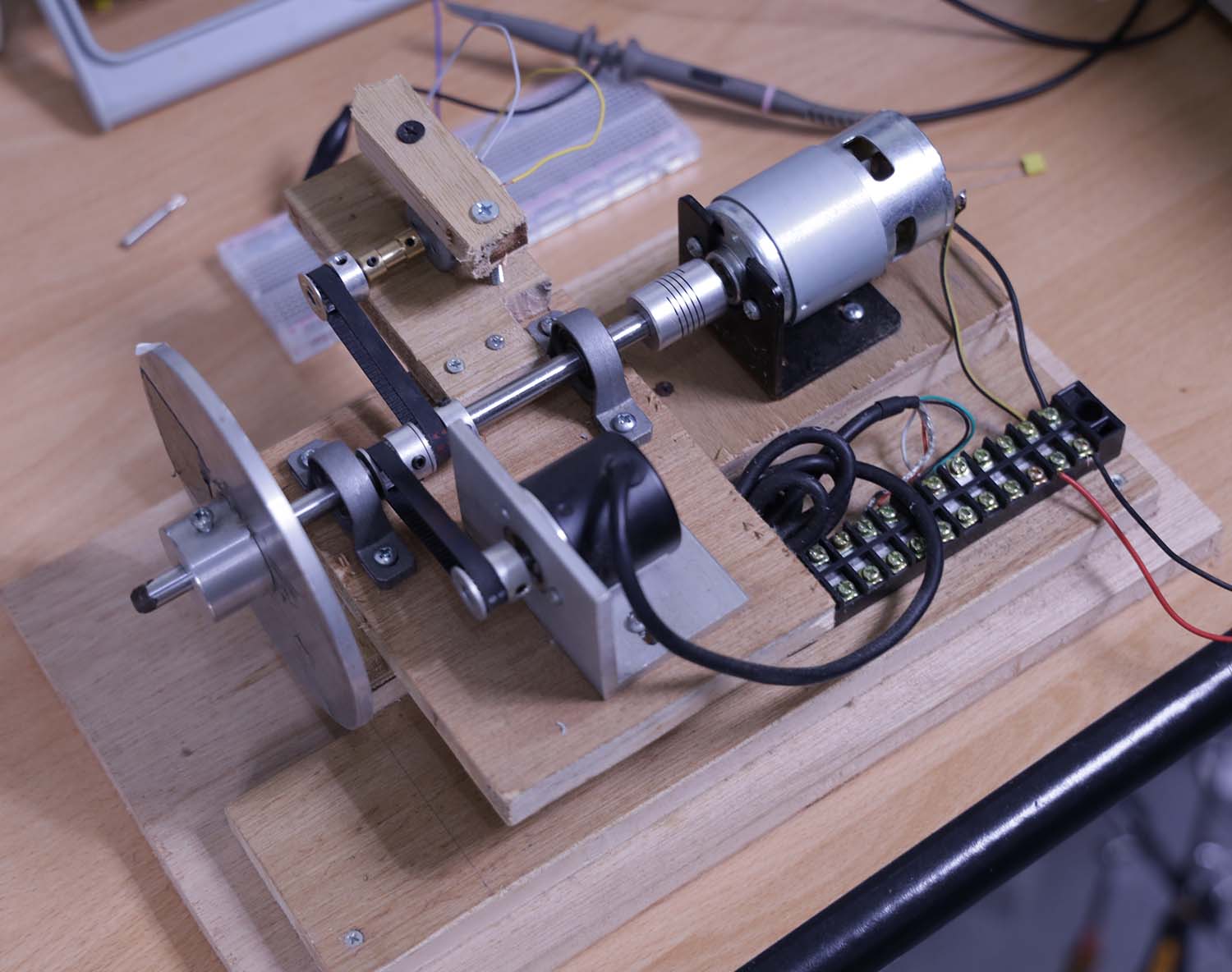
Berikut ini tampak atas setting percobaan. Motor DC di sebelah kanan sebagai penggerak, motor DC di atas (tertutup triplek) sebagai pengukur kecepatan.
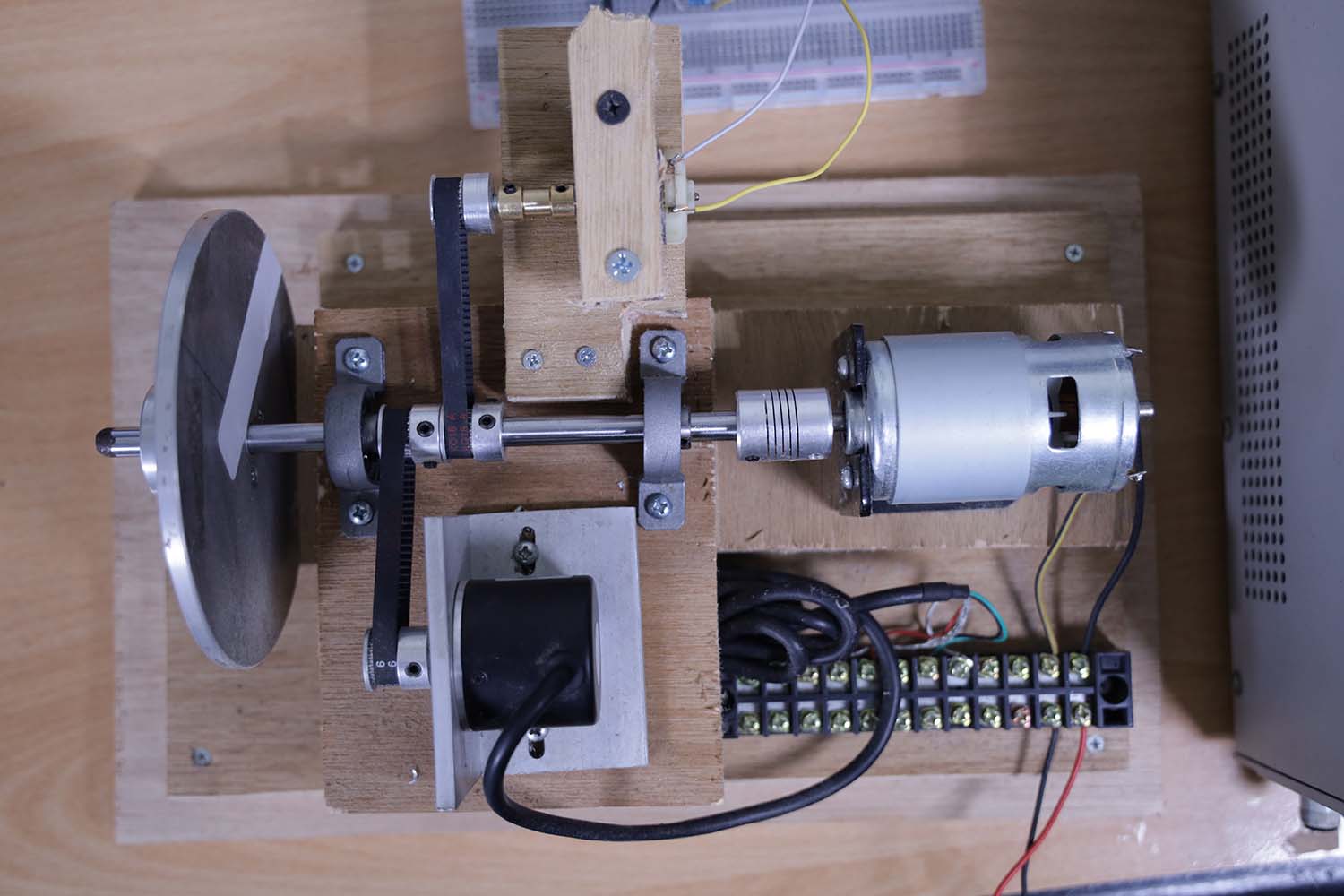
Berikut ini tampak atas setting percobaan
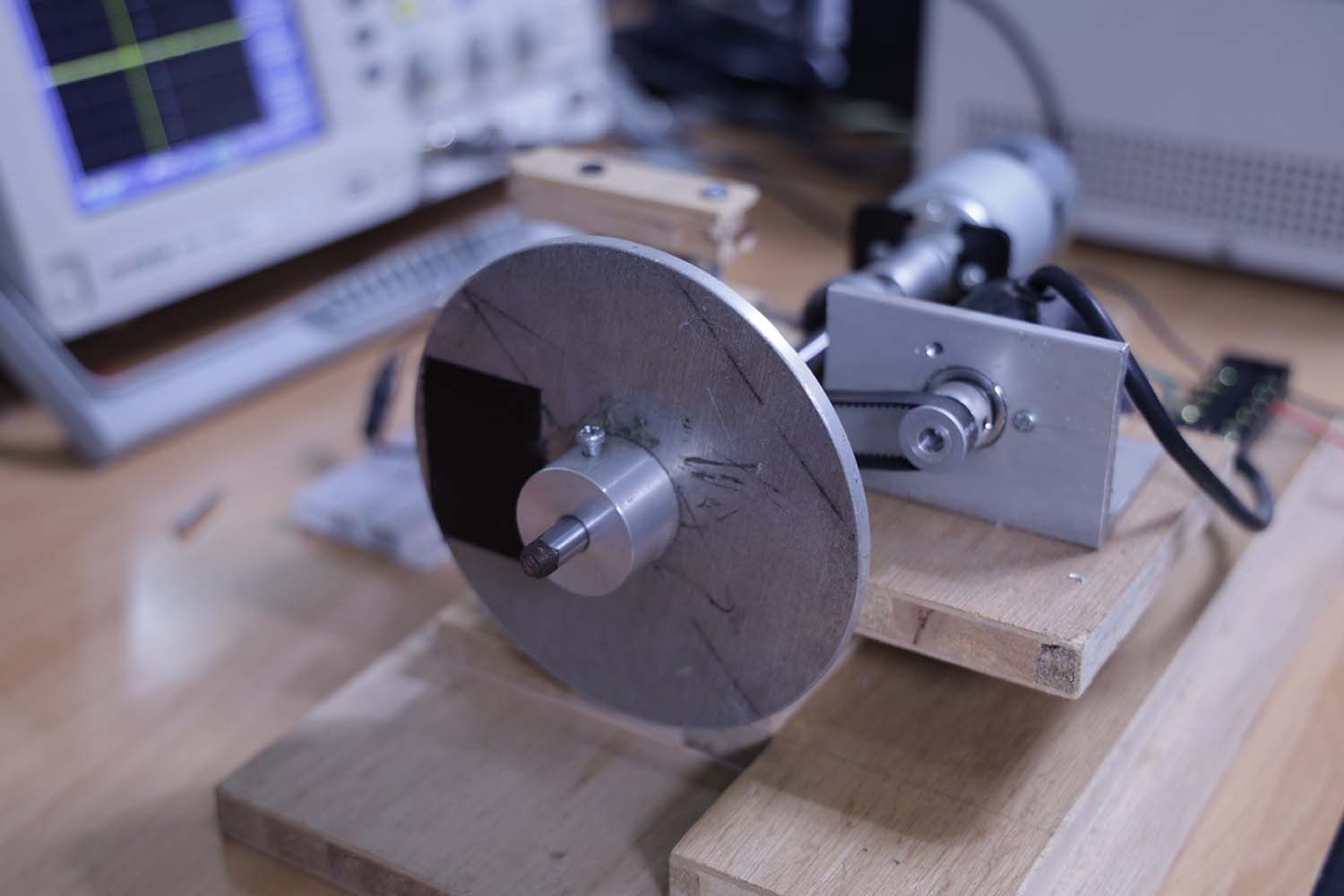
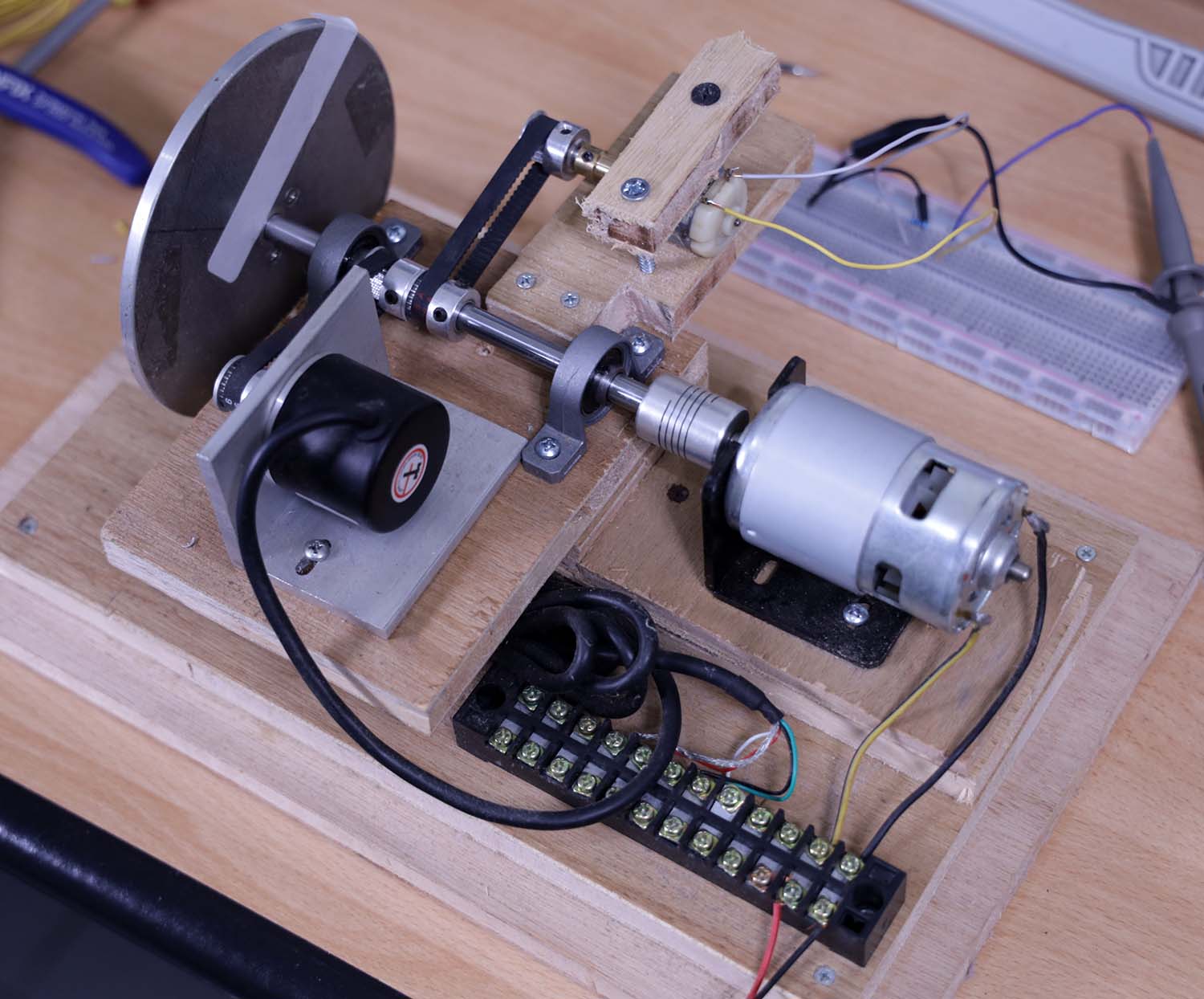
Berikut ini tampak samping setting percobaan
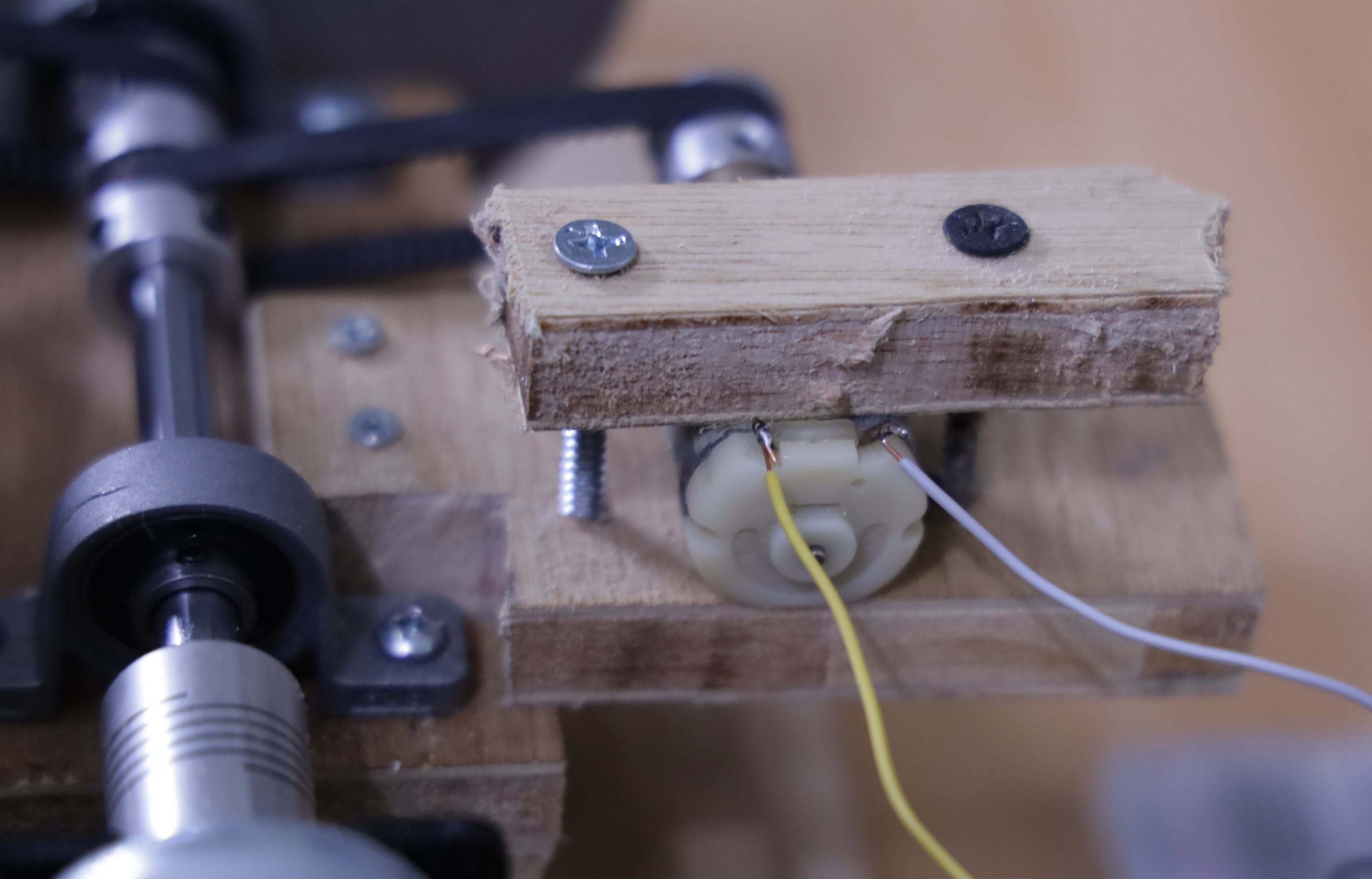
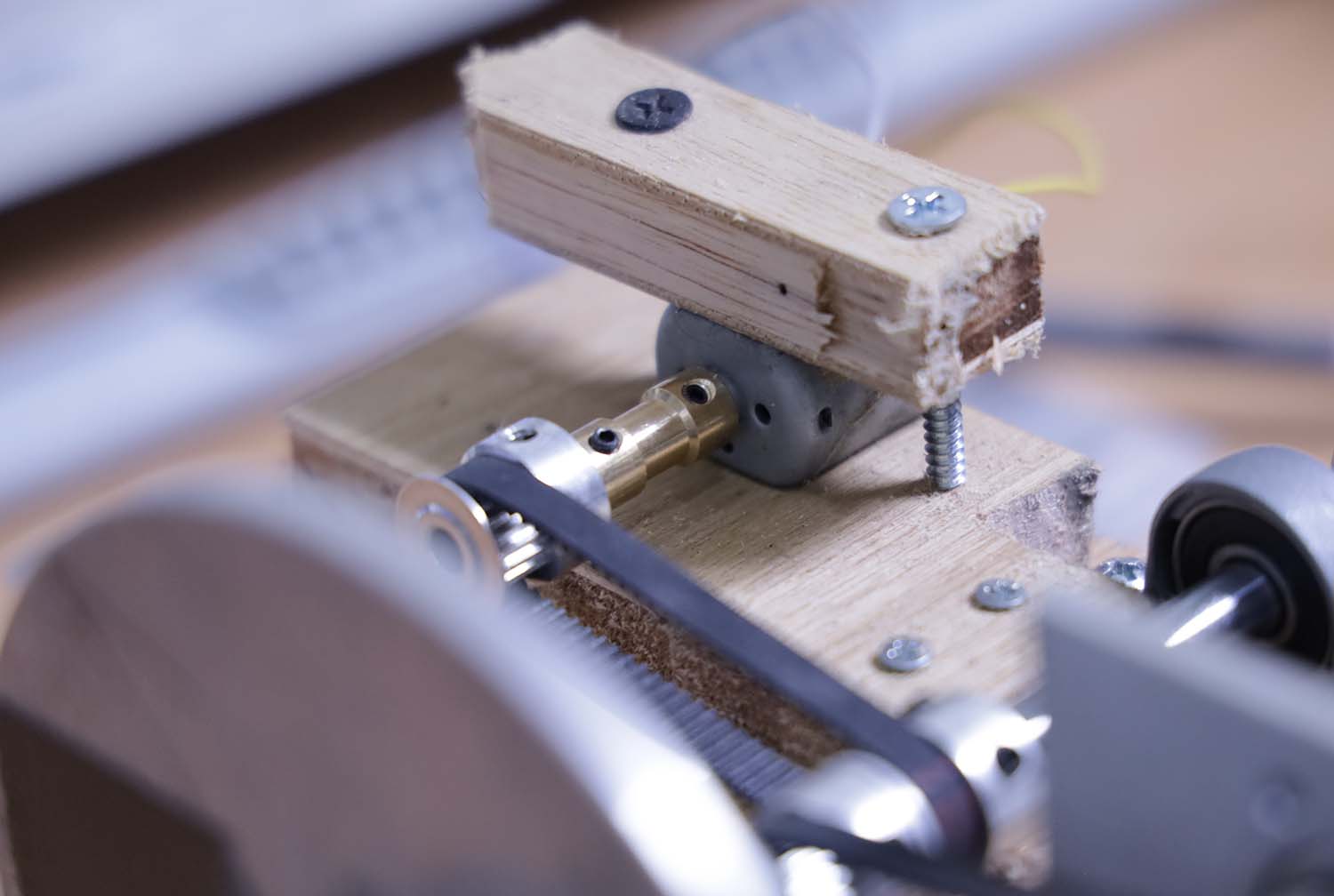
Berikut ini detail pemasangan motor DC .
Berikut ini detail pemasangan motor DC .
Berikut ini tampak atas percobaan
Berikut ini tampak atas percobaan
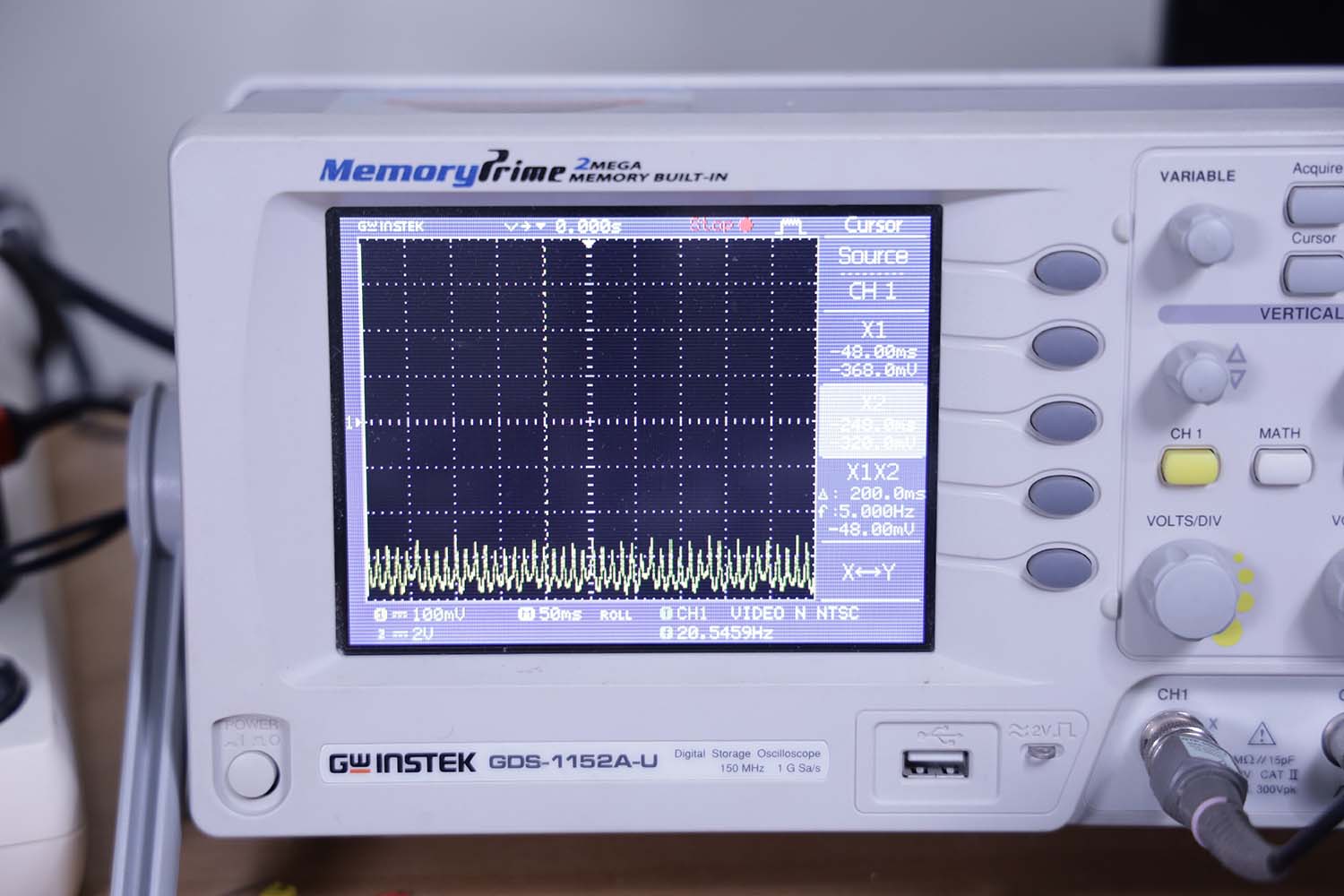
Berikut ini output tegangan pada motor DC demgam setting 100 mV per div dan 50 ms per div.
Berikut ini output tegangan pada motor DC demgam setting 100 mV per div dan 50 ms per div. Arah putaran motor kebalikan dari yang sebelumnya.
Berikut ini percobaan mengukur tegangan pada motor DC kecil pada waktu berputar.
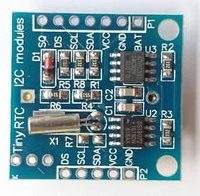
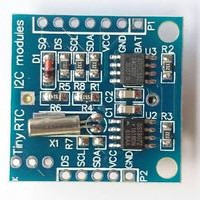
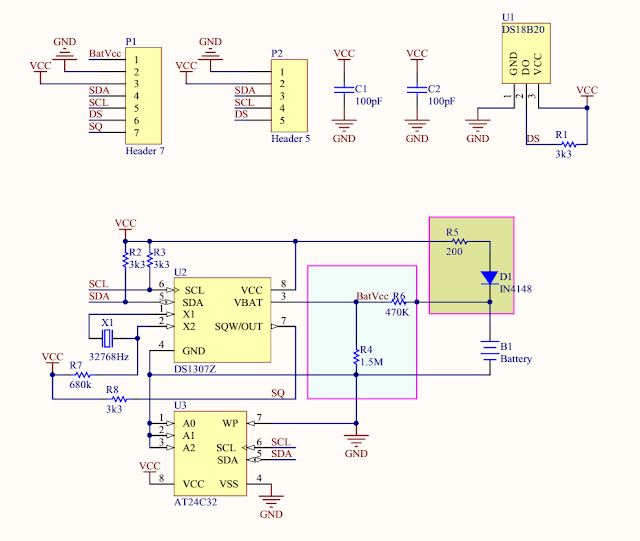
Maxim DS1307 adalah real time clock yang di dalamnya juga terdapat 56 byte RAM. Memori RAM ini dapat dipakai sebagai NVRAM (Non Volatile Read Only Memory).
Gambar
Berikut ini adalah modul DS1307 yang sudah dilengkapi juga dengan AT24
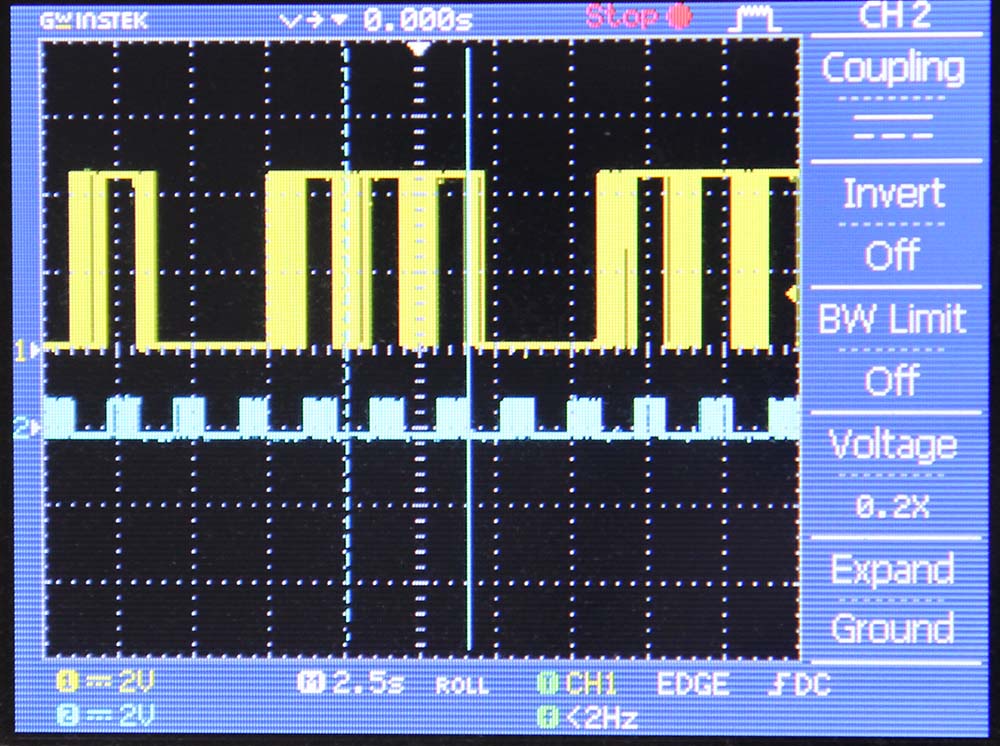
Berikut ini percobaan 2 task periodik pada FreeRTOS
Spesifikasi
Task1:
Waktu eksekusi 4 detik
Perioda 10 detik (10,8 detik terukur)
Task2:
Waktu eksekusi 1 detik
Perioda 2 detik
Perangkat Lunak
// 1 task periodik dengan FreeRTOS Arduino Nano (ATmega328)
// template umum FreeRTOS di Arduino Nano https://github.com/feilipu/Arduino_FreeRTOS_Library/blob/master/examples/AnalogRead_DigitalRead/AnalogRead_DigitalRead.ino
// contoh pemakaian vTaskDelayUntil dan xTaskGetTickCount dari https://github.com/feilipu/avrfreertos/blob/master/MegaBlink/main.c
#include "Arduino_FreeRTOS.h"
#include <semphr.h>
#define LED1 2
#define LED2 3
#define LED3 4
#define LED4 5
static void TaskBlinkLED1(void *pvParameters);
static void TaskBlinkLED2(void *pvParameters);
// task handle diperlukan jika ingin mengakses parameter suatu task. optional
TaskHandle_t xHandle1 = NULL;
void TaskDummy(int LED_A, int LED_B, long int counter) {
long int i;
for (i = 0; i < counter; i++) {
cli();
digitalWrite(LED_A, LOW);
digitalWrite(LED_B, HIGH);
sei();
asm("nop");
cli();
digitalWrite(LED_A, HIGH);
digitalWrite(LED_B, LOW);
sei();
asm("nop");
}
digitalWrite(LED_A, LOW); // matikan semua LED
digitalWrite(LED_B, LOW);
}
void setup() {
Serial.begin(115200);
Serial.println("Start");
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED_BUILTIN, OUTPUT);
xTaskCreate(
TaskBlinkLED1
, "Task1" // A name just for humans
, 100 // This stack size can be checked & adjusted by reading the Stack Highwater
, NULL
, 2 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest.
, &xHandle1 );
xTaskCreate(
TaskBlinkLED2
, "Task2" // A name just for humans
, 100 // This stack size can be checked & adjusted by reading the Stack Highwater
, NULL
, 3 // Priority, with 3 (configMAX_PRIORITIES - 1) being the highest, and 0 being the lowest.
, &xHandle1 );
}
void loop() {
}
static void TaskBlinkLED1(void *pvParameters) // Main Red LED Flash
{
TickType_t xLastWakeTime;
/* The xLastWakeTime variable needs to be initialised with the current tick
count. Note that this is the only time we access this variable. From this
point on xLastWakeTime is managed automatically by the vTaskDelayUntil()
API function. */
xLastWakeTime = xTaskGetTickCount();
while (1)
{
Serial.println(millis());
Serial.println(xLastWakeTime); // cetak last wake time, untuk debugging. hanya untuk slow system
TaskDummy(LED1, LED2, 10000L / 0.172 * 4 ); // 4 detik waktu eksekusi
vTaskDelayUntil( &xLastWakeTime, ( 10000L / portTICK_PERIOD_MS ) ); // 10 detik perioda
}
}
static void TaskBlinkLED2(void *pvParameters) // Main Red LED Flash
{
TickType_t xLastWakeTime;
/* The xLastWakeTime variable needs to be initialised with the current tick
count. Note that this is the only time we access this variable. From this
point on xLastWakeTime is managed automatically by the vTaskDelayUntil()
API function. */
xLastWakeTime = xTaskGetTickCount();
while (1)
{
Serial.println(millis());
Serial.println(xLastWakeTime); // cetak last wake time, untuk debugging. hanya untuk slow system
TaskDummy(LED3, LED4, 10000L / 0.172 ); // 1 detik waktu eksekusi
vTaskDelayUntil( &xLastWakeTime, ( 2000L / portTICK_PERIOD_MS ) ); // 2 detik perioda
}
}
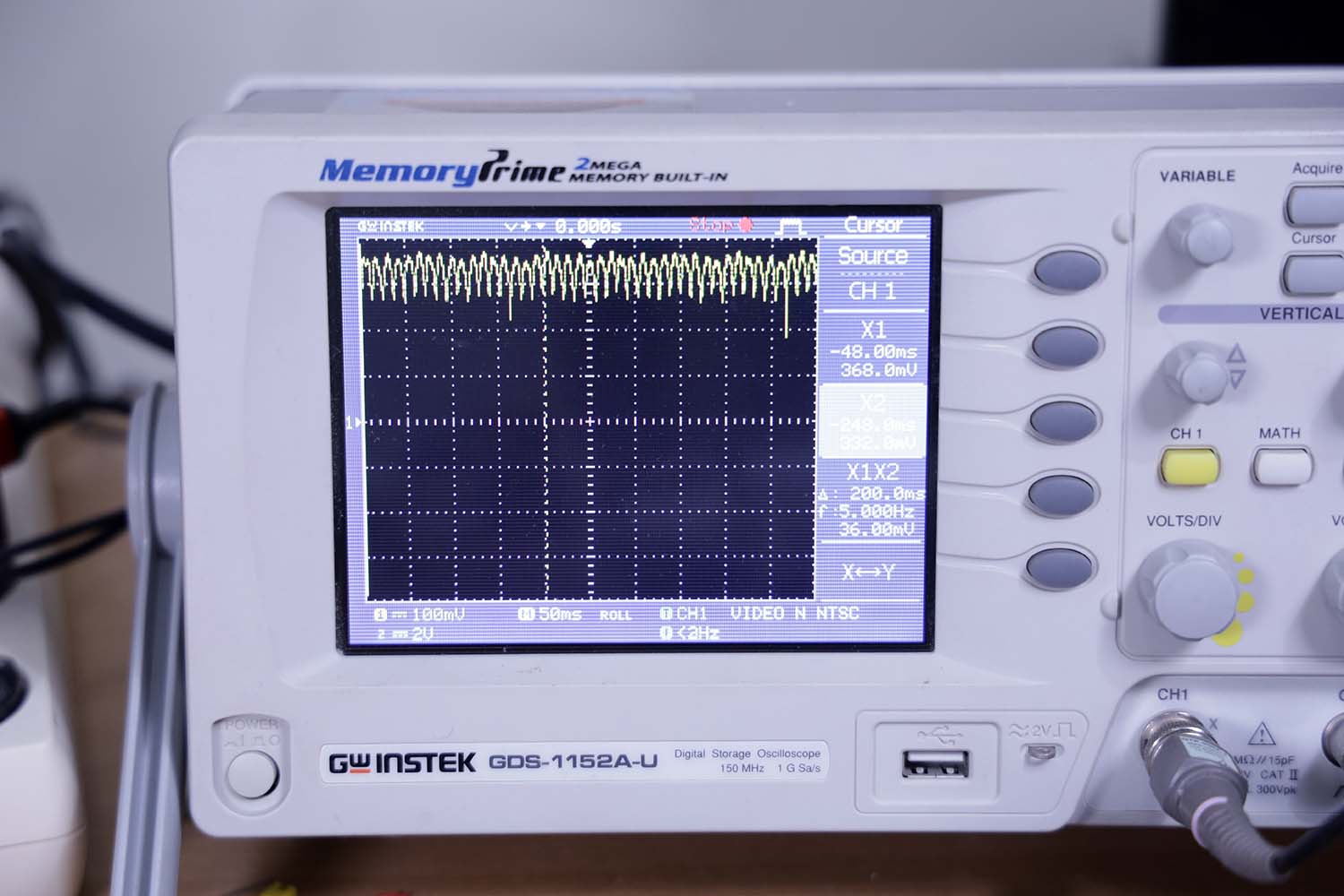
Pengukuran
Berikut ini adalah tampilan kedua buah task di layar osiloskop.
Berikut ini mesin cuci WF8590NHW dengan spesifikasi sangat sederhana: ” Top-Load dengan Diamond Drum – 6 Kg”. Sama sekali tidak disebut kemampuan prosesornya. Kalau dibongkar di dalamnya, terlihat sistem embedded di dalamnya menggunakan prosesor tipe TMP91FU62DFG. Prosesor tersebut memiliki kemampuan clock maksimum 20 MHz, ROM: 96K bytes (Flash ROM), RAM: 4K bytes.
Mesin cuci Samsung WF8590NHW
Spesifikasi Mesin Cuci
Spesifikasi ringkas: Top-Load dengan Diamond Drum – 6 Kg
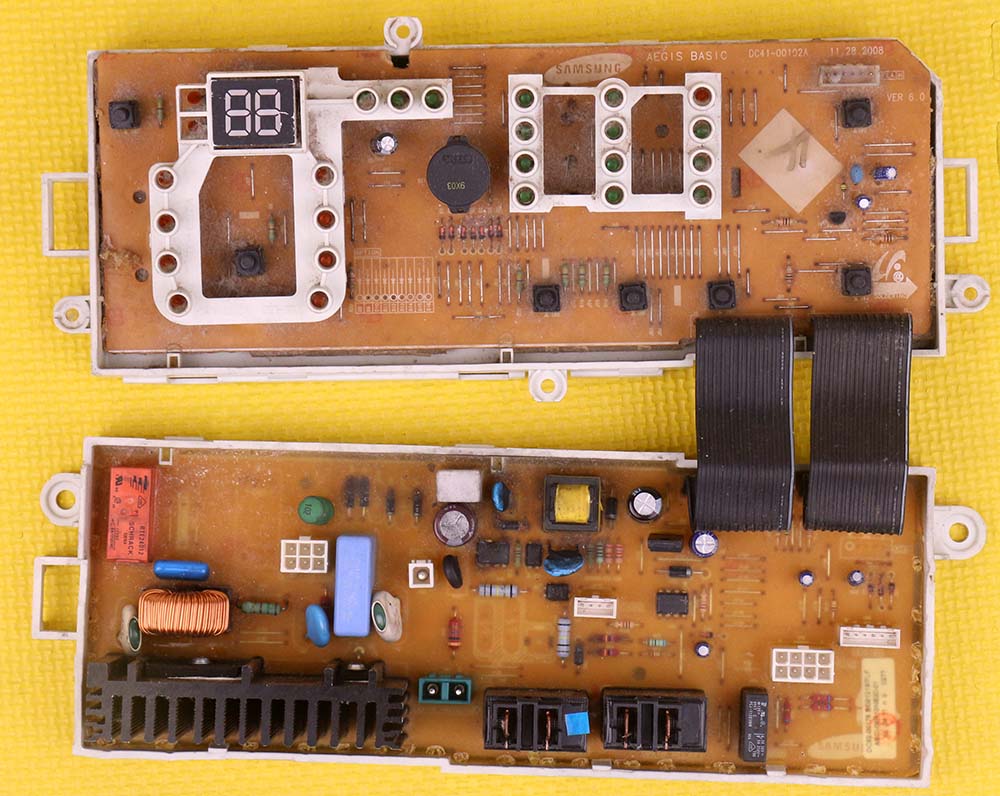
Berikut ini papan rangkaian pengendali mesin cuci tersebut. Ukuran papan rangkaian adalah panjang 26 cm, lebar 10 cm. Posisi papan rangkaian ini tepat di belakang panel. Pada papan rangkaian terlihat LED 7 segment di bagian kiri atas, LED ini sama dengan yang nampak di bagian atas depan mesin cuci.
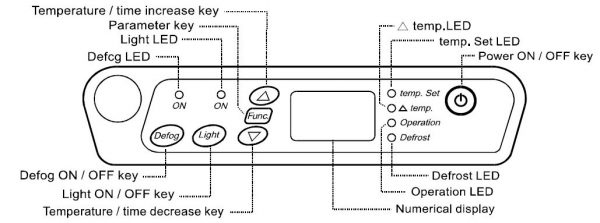
Berikut ini tampilan panel atas yang terletak tepat di depan papan rangkaian tersebut.
Panel mesin cuci
Mesin cuci ini menggunakan mikroprosesor buatan Toshiba tipe TMP91FU62DFG
Papan rangkaian prosesor di mesin cuci WF8590NHWProsesor TMP91FU62DFG
Spesifikasi Prosesor TMP91FU62DFG
High-speed 16-bit CPU (900/L1 CPU)
Instruction mnemonics are upward-compatible with TLCS-900,900/H,900/L
16 Mbytes of linear address space
General-purpose registers and register banks
16-bit multiplication and division instructions; bit transfer and arithmetic instructions
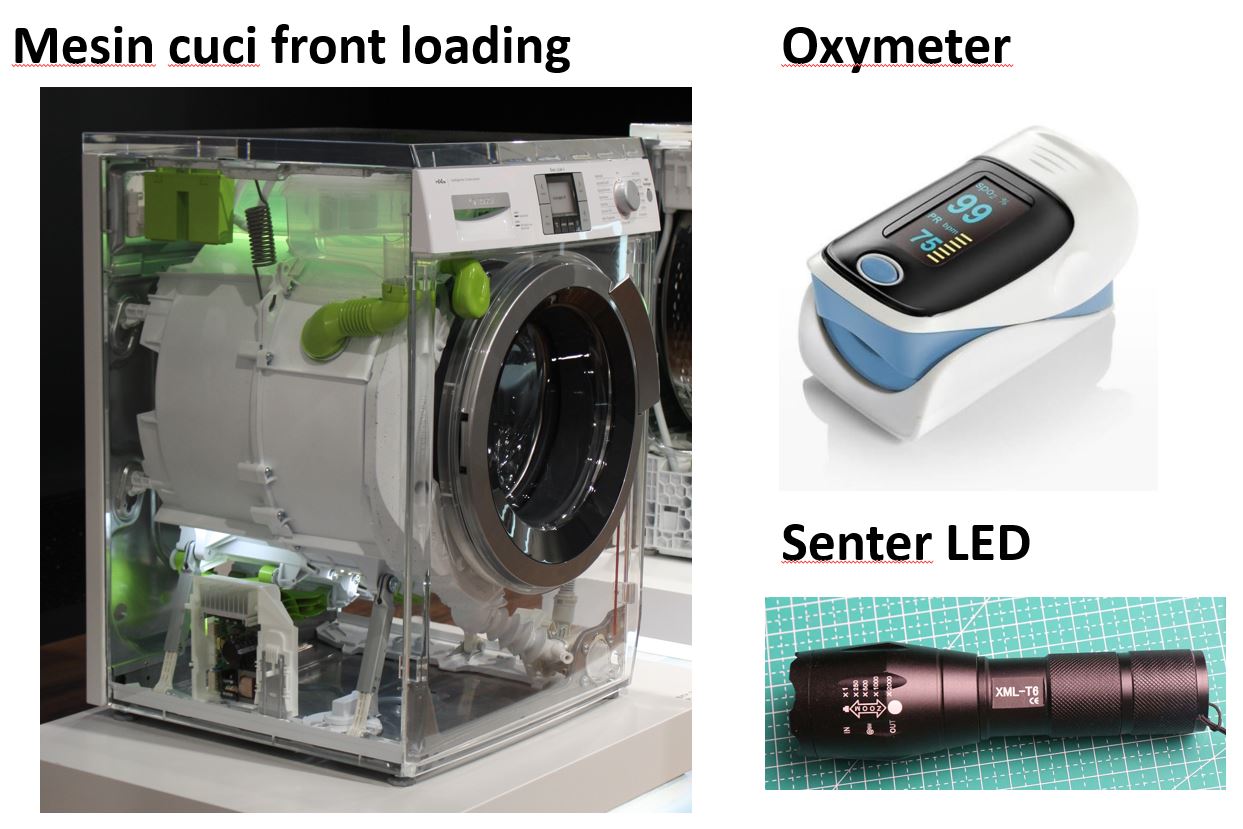
Berikut ini beberapa contoh sistem embedded yang sering dijumpai sehari-hari.
Mesin cuci front loading otomatis
Pulse oxymeter, alat pengukur kadar saturasi oksigen dalam darah.
Senter LED
Contoh sistem embedded
Contoh Sistem Non Embedded
Sebagai perbandingan, berikut ini contoh sistem yang bukan sistem embedded. Berikut ini contoh mesin cuci manual top loading dua tabung, di mana semua operasi dilakukan manual
Diagram blok mesin cuci top loading
Timer menggunakan mekanik / elektromekanik, tidak ada komponen mikroprosesor sehingga praktis tidak ada komputasi di dalamnya
Pada mesin cuci ini ada 2 motor terpisah, yaitu motor pencuci dan motor pengering. Pengisian dan pembuangan air menggunakan katup mekanik, dengan pembukaan dan penutupan dilakukan secara manual.
Timer pencuci fungsinya menyalakan motor pencuci selama beberapa menit, ditentukan oleh orang yang mencuci. Selama pencucian, arah putaran motor dapat berubah-ubah arah supaya pencucian lebih baik dibandingkan kalau putaran motor hanya satu arah.
Timer pengering fungsinya menyalakan motor pengering selama beberapa menit, ditentukan oleh orang yang mencuci.
Fitur otomatis pada mesin cuci ini hanya pada timer pencuci, timer pengering dan sensor pintu pengering yang otomatis menghentikan motor pengering jika pintu penutup pengering dibuka dalam keadaan motor menyala.
Mesin cuci ini tidak mengandung prosesor ataupun pengolah informasi , sehingga dapat dikatakan sistem ini bukan termasuk sistem embedded
Mesin Cuci Front Loading Otomatis
Mesin cuci front loading
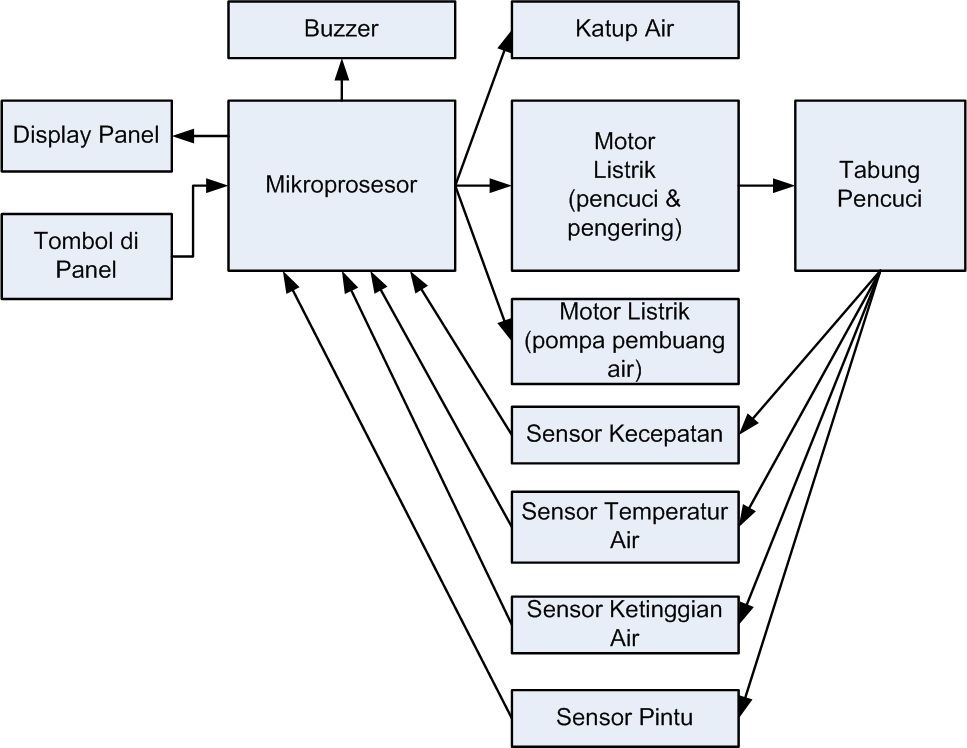
Diagram blok mesin cuci front loading
Berikut ini ilustrasi mesin cuci front loading otomatis. Tabung pencuci digerakkan oleh motor. Ada katup pengisian air, ada pompa pembuangan air. Semuanya dikendalikan secara otomatis dengan mikroprosesor. Sensor yang dipakai antara lain sensor kecepatan motor, sensor temperature air, sensor ketinggian air, sensor pintu. Pengaturan cukup dengan menekan tombol-tombol di panel. Status mesin cuci ditampilkan pada sebuah display LCD. Dari diagram bloknya saja sudah Nampak bahwa system ini cukup kompleks. Bagi pengguna, yang penting adalah bahwa mesin ini dapat mencuci baju dengan baik. Pengguna tidak mencari mesin cuci berdasarkan kecepatan CPU, kapasitas memori dan sebagainya.
Ada juga kunci pintu supaya tidak dapat dibuka setelah mesin dinyalakan.
Mesin cuci ini termasuk CPS (Cyber Physical System), karena ada benda fisik (physical) yang diatur, yaitu tabung pencuci dan air di dalamnya. Tabung pencuci diatur kecepatan putarannya, sedangkan air diatur ketinggian dan temperaturnya.
Aktuator pada mesin cuci ini adalah sebagai berikut
panel display LCD
Buzzer
katup air
motor listrik pencuci & pengering
pompa pembuang air
Sensornya pada mesin cuci ini adalah sebagai berikut
sensor ketinggian air
sensor temperatur air
sensor kecepatan putaran motor
sensor pintu (terbuka atau tertutup)
tombol pada panel
Berikut ini tahap proses mesin cuci pada pencucian normal
Cucian dimasukkan (secara manual)
Pintu ditutup (secara manual)
Jenis pencucian dipilih oleh pengguna & proses dimulai
Pintu dikunci otomatis
Masukkan air & sabun (air otomatis, sabun manual)
Cuci dengan diputar bolak-balik dengan kecepatan tertentu
Buang air cucian & pompa air keluar
Cucian dibilas dengan air untuk membersihkan sabun
Keringkan dengan putaran tinggi & pompa air keluar
Tunggu sampai tabung berhenti berputar
Buka kunci pintu (otomatis)
Dalam prakteknya tahap-tahap di atas lebih kompleks, karena ada beberapa mode pencucian (pencucian cepat 29 menit, pencucian lama 2 jam, pengeringan saja, dan sebagainya) dan juga ada kemungkinan terjadinya kesalahan/gangguan pada waktu pencucian. Contoh gangguan adalah air tidak mengisi dengan baik, pompa pembuangan macet dan sebagainya
Pulse Oxymeter
Berikut ini alat pulse oximeter yang populer untuk mengukur denyut jantung dan kadar oksigen dalam darah.
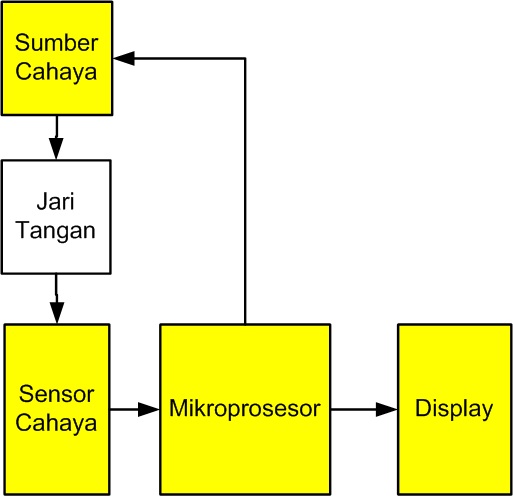
Pulse oxymeterDiagram blok pulse oxymeter
Alat ini merupakan salah satu perangkat untuk mengukur kondisi pasien covid19 dan orang yang ada gangguan asthma.
Prinsip kerja alat ini adalah mengukur intensitas cahaya yang menembus jari tangan pada 2 buah Panjang gelombang yang berbeda
Ada sumber cahaya yang diatur oleh mikroprosesor. Intensitas cahaya yang menembus jari tangan diukur oleh sensor cahaya. Fluktuasi cahaya tersebut diproses dengan suatu algoritma di mikroprosesor. Data denyut jantung dan kadar oksigen yang didapat kemudian ditampilkan pada display
Pada system ini tidak ada pengendalian, jadi system ini tidak termasuk CPS, namun system ini termasuk ke system embedded
Mikroprosesor hanya memilih sensor mana yg aktif dengan mengatur sumber cahaya.
Cyber Physical System (Sistem Fisik Siber) adalah sistem yang terdiri dari subsistem fisik , komputasi dan jaringan komunikasi
Pada sistem embedded, suatu mikroprosesor atau pengolah informasi lainnya dihubungkan dengan suatu system fisik. Keadaan dari system fisik dibaca oleh mikroprosesor, kemudian program di mikroprosesor mengatur system fisik. Pada system yang sederhana, kombinasi ini dapat diprogram dengan mudah. Namun pada system yang lebih kompleks, interaksi antara komputasi dan fisik ini cukup rumit. Pada tahun 2006, mulai muncul istilah ‘Cyber Physical System’, sebagai disiplin ilmu baru untuk membahas permasalahan ini.
Cyber Physical System
Definisi Cyber Physical System
Berikut ini definisi Cyber Physical System pada beberapa literatur.
Definisi 2: “A cyber-physical system consists of a collection of computing devices communicating with one another and interacting with the physical world via sensors and actuators in a feedback loop”. (Rajeev Alur, Principles of Cyber-Physical Systems, The MIT Press 2015, halaman xi)
Definisi 3: “Cyber-physical systems combine cyber capabilities with physical capabilities to solve problems that neither part could solve alone” (Andre Platzer, Logical Foundations of Cyber-Physical Systems, Springer 2018)
Definisi 5: “Cyber-physical Systems (CPS) are engineered systems that are built from, and depend upon, the seamless integration of computation and physical components. CPS tightly integrate computing devices, actuation and control, networking infrastructure, and sensing of the physical world” (US National Science Foundation, Cyber-Physical Systems (CPS), 2021)
Definisi 1: Cyber Physical System (Sistem Fisik Siber) adalah sistem yang terdiri dari subsistem fisik , komputasi dan jaringan komunikasi
Definisi 2: Sistem Fisik Siber terdiri dari kumpulan perangkat komputasi yang berkomunikasi satu sama lain dan berinteraksi dengan dunia fisik melalui sensor dan aktuator dalam suatu umpan balik.
Definisi 3: Sistem Fisik Siber menggabungkan kemampuan siber (komputasi) dengan kemampuan fisik untuk menyelesaikan masalah-masalah yang tidak dapat diselesaikan oleh salah satu darinya saja (fisik atau komputasi)
Definisi 4: Istilah siber fisik merujuk ke gabungan erat dan koordinasi antara komputasi dan sumber daya fisik.
Definisi 5: Sistem Fisik Siber adalah sistem yang direkayasa yang dibuat dan tergantung pada integrasi erat antara komponen komputasi dan komponen fisik. Sistem Fisik Siber menggabungkan secara erat perangkat komputasi, aktuator dan kendali, infrastruktur jaringan komunikasi dan pemindaian dunia fisik.
Definis 6: Sistem Fisik Siber adalah gabungan antara komputasi dengan proses fisik
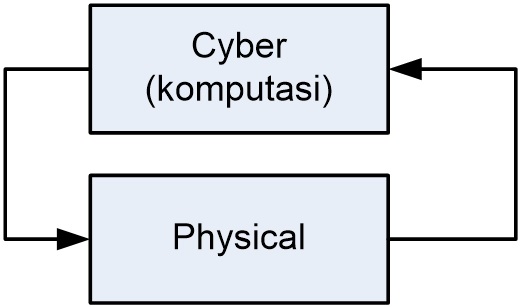
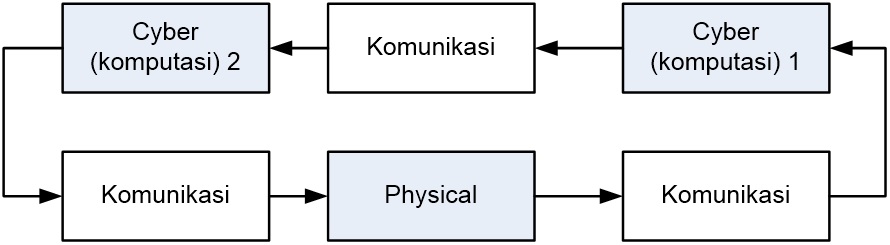
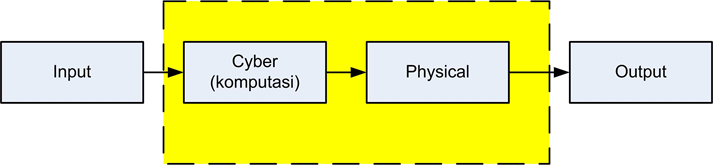
Jadi ada 3 elemen pada suatu CPS: cyber yaitu komputasi, physical yaitu system fisik yang diatur/dikendalikan, komunikasi yang menghubungkan antara beberapa komputasi yang terdistribusi dan menghubungkan antara komputasi dan physical.
Lee & Seshia menyebutkan adanya networking, artinya ada komunikasi di dalamnya. Rajeev Alur menyebutkan adanya komunikasi antar perangkat komputasi yang dipakai. NSF pada tahun 2010 tidak menyebutkan komunikasi, namun pada tahun 2021 mencantumkan ‘networking infrastructure‘ pada penjelasannya.
Berikut ini ilustrasi system CPS dengan memasukkan elemen komunikasi.
Cyber Physical System dengan komunikasi
Adanya komunikasi membuat perilaku system lebih kompleks, karena ada factor waktu jeda pada pengiriman data.
Komputasi dan komunikasi ini dipelajari dalam ilmu distributed systems atau distributed computing.
Pada pembahasan ini kita tidak membahas aspek komunikasi ini.
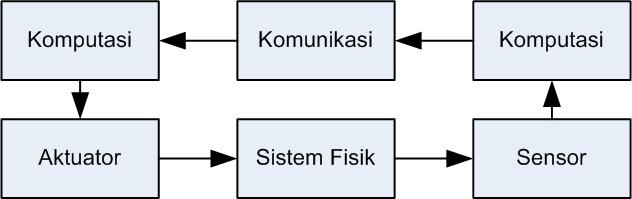
Berikut ini adalah sistem CPS dengan memasukkan aktuator dan sensor.
Sistem Siber Fisikal
Fungsi aktuator adalah mengubah besaran listrik menjadi besaran fisik. Fungsi sensor adalah mengubah besaran fisik menjadi besaran listrik. Keseluruhan sistem membentuk umpan balik tertutup (closed feed back loop)
Sistem Kendali Closed Loop.
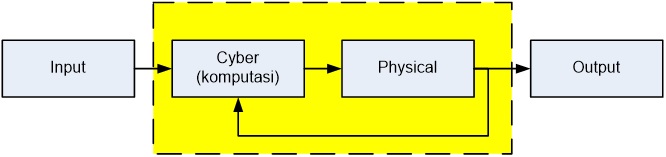
Berikut ini diagram sebuah system kendali . Pada system kendali ini ada benda physical yang dikendalikan, komputasi sebagai pengendali, input biasanya dari pengguna / manusia, dan output.
Sistem kendali umpan tertutup sebagai CPS
Pada system kendali diinginkan output mengikuti input. Pada system ini terdapat umpan balik dari output ke komputasi, sehingga system ini juga disebut system kendali umpan tertutup, atau closed loop control.
Perilaku system kendali seperti ini dipelajari secara detail di kuliah system kendali. Di kuliah system kendali titik beratnya di analisis matematis dari system kendali tersebut.
Sistem Kendali Open Loop
Berikut ini contoh system kendali tanpa umpan balik. Keadaan dari system fisik tidak dimasukkan lagi ke komputasi. Sistem ini dapat berfungsi baik jika perilaku physical diketahui dengan baik dan tidak ada gangguan dari luar.
Sistem kendali open loop
Menurut definisi CPS, system ini tidak termasuk dalam CPS. Sistem ini masih termasuk system embedded karena ada elemen komputasi di dalamnya.
Sistem Monitoring
Sistem embedded untuk monitoring
Ada juga system embedded yang tidak punya input, namun hanya mengolah sinyal keluaran dari suatu benda fisik. Contohnya adalah pada alat pengukur dan perekam data. Alat ini hanya mengukur besaran fisik suatu benda, kemudian mencatat , menganalisis, mengirim ke tempat lain atau menampilkan besaran tersebut. Contohnya misalnya IoT atau internet of things untuk mencatat parameter cuaca seperti temperature, kelembaban dan curah hujan.
Menurut definisi CPS di atas, sistem monitoring ini tidak termasuk dalam CPS. Sistem ini masih termasuk system embedded karena ada elemen komputasi di dalamnya.
Algoritma Cyber Physical System
CPS melibatkan suatu sistem kendali di dalamnya, sehingga diperlukan suatu algoritma sistem kendali.
Algoritma sistem kendali yang dapat dipakai antara lain sebagai berikut
Model Continuous Dynamics, Model berbasis dinamika kontinu, biasanya dibuat menggunakan persamaan diferensial. Contoh yang sering dipakai adalah kendali berbasis PID (Proportional Integral Derivative)
Model Discrete Dynamics, yaitu model yang berbasis dinamika sistem discrete event. Contohnya adalah pemodelan dengan State Chart, dan perangkat lunaknya dibuat dengan model Finite State Machine (FSM).
Model Hybrid, menggabungkan antara continuous dynamics dengan discrete dynamics.
Penutup
Pada pembahasan ini kita hanya membahas terutama aspek komputasi dan physical saja. Aspek komunikasi tidak dibahas.
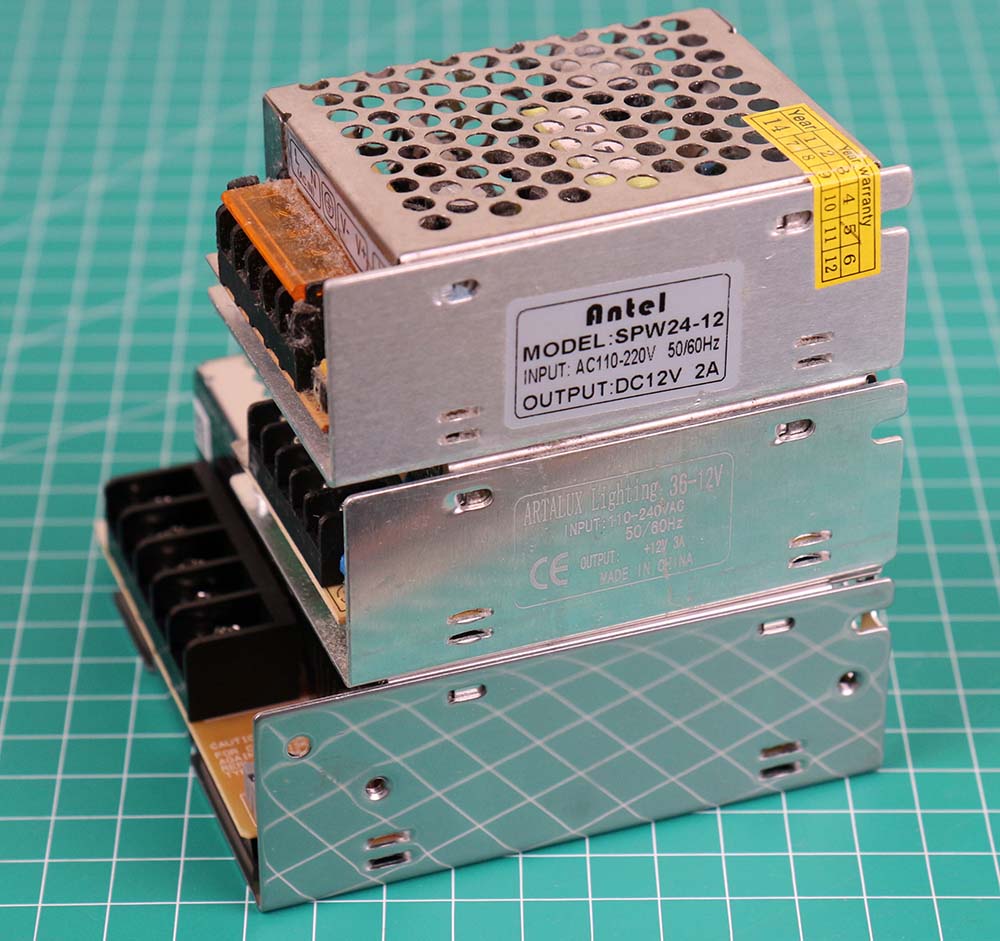
Perangkat elektronik memerlukan sumber daya listrik. Salah satu sumber daya yang sering dipakai adalah adaptor. Kebutuhan listrik perangkat biasanya dinyatakan dalam tegangan dan arus, misal 12 volt, 5 ampere. Salah satu permasalahan yang sering membingungkan adalah bagaimana kalau adaptor yang tersedia tegangannya cocok, namun ampernya lebih besar dari yang diperlukan.
Persoalan
Contoh persoalannya sebagai berikut:
Maaf mau tanya tentang adaptor. Apakah adaptor 12 volt 5 Ampere (anggap saja murni 5 ampere), itu artinya dia mengeluarkan tegangan 12 volt dan arus konstan 5 ampere ? Atau arus yg dikeluarkan hanya sesuai kebutuhan beban yg dilalui ? Misal bebannya lampu 12 volt 1A, jika di beri adaptor 12 volt 5 A, maka output adaptor tersebut hanya 12 volt 1A sesuai beban nya ?
Atau malah sebaliknya, lampu nya bisa rusak karena keluaran dari adaptor full 5 Ampere.
Jawaban
Adaptor yg banyak dijual umumnya dapat dipandang sebagai sumber tegangan. Artinya adaptor menjaga tegangan konstan, sementara arus berubah sesuai keperluan. Adaptor punya batas arus maksimum, di atas batas itu tegangan tidak bisa dijaga (turun) atau sekringnya putus.
Jadi penggunaan adaptor yang arusnya lebih besar daripada yang diperlukan tidak menjadi masalah. Adaptor akan memberikan tegangan sesuai dengan yang disebutkan (misal 12 volt), sedangkan arus yang disediakan akan disesuaikan dengan arus yang diperlukan oleh perangkat elektronik tersebut. Biasanya arus yang diperlukan akan berubah-ubah tergantung apa yang sedang dikerjakan oleh perangkat tersebut.
Apa yang terjadi kalau adaptor dengan arus besar dihubungkan ke beban yang arusnya lebih kecil dari arus adaptor? Pada kasus ini adaptor akan mengeluarkan tegangan sesuai spesifikasinya, misal 12 volt, sedangkan arusnya disesuaikan dengan kebutuhan dari beban. Jika beban perlu 1 ampere sedangkan adaptor 5 ampere, maka arus yang keluar hanya akan di 1 ampere saja.
Apa yang terjadi kalau adaptor dengan dihubungkan ke beban yang arusnya lebih besar daripada kemampuanarus adaptor? Pada kasus ini dapat terjadi beberapa kemungkinan:
Pada adaptor yang bagus dengan pengaman arus lebih: adaptor jenis ini jika arus yang diminta terlalu besar, maka arusnya akan dibatasi. Konsekuensinya tegangan keluaran akan turun.
Pada adaptor yang bagus dengan pengaman tipe foldback: adaptor jenis ini jika arus yang diminta terlalu besar, maka arusnya akan diperkecil dan juga tegangan akan dikurangi. Adaptor perlu direset / dimatikan dulu supaya dapat kembali ke kondisi semula.
Adaptor dengan fuse/sekering resettable: fuse akan memanas dan akan akan mengurangi arus. Kalau fuse dingin, adaptor kembali ke keadaan semula.
Adaptor dengan sekering biasa: sekering akan putus dan perlu diganti baru
Adaptor tanpa pengaman: dapat terjadi panas berlebih yang merusak adaptor, atau ada komponen yang rusak/ terbakar.
Perbandingan power supply omron dengan power supply lain