Artikel-Artikel ESP32 selanjutnya akan ditampilkan di situs https://esp32.iptek.web.id/
Noise pada Op-Amp Bipolar vs FET dan Tabung Vakum
Pernyataan menarik kenapa tabung vakum suaranya lebih ‘bagus’ dibandingkan transistor bipolar. Op-amp modern banyak yang menggunakan JFET dan MOSFET. Konon suaranya lebih bagus.
“Many audio experts believe that the sound quality of a high performance FET op amp is superior to that of bipolar op amps. A possible reason for this is that bipolar designs generate greater od-order harmonics than FETs. To the human ear, odd-order harmonics have long been identified as sounding more unpleasant than even-order harmonics. FETs, like vacuum tubes, have a square-law I-V transfer function which is more linear than the exponential transfer function of a bipolar transistor. As a direct result of this square-law characteristic, FETs produce predominantly even-or- der harmonics.”
Membaca Nilai GPIO pada ESP32 tanpa fungsi digitalRead()
Berikut ini akan ditujukkan cara membaca Nilai GPIO pada ESP32 tanpa fungsi digitalRead(). Membaca GPIO dengan digitalRead() praktis secara programming, namun relatif lambat.
#include "soc/gpio_struct.h" // Include the GPIO register definitions
//##include "soc/io_mux_reg.h" // Include the IO_MUX register definitions
// Define the GPIO pin number
const int gpioPin = 18;
void setup() {
Serial.begin(115200);
pinMode(gpioPin, INPUT_PULLUP); // Enable pull-up
}
void loop() {
// Read the GPIO input register
bool gpio18_state = (GPIO.in >> 18) & 0x01;
Serial.print("GPIO 18 state: ");
Serial.println(gpio18_state);
delay(100);
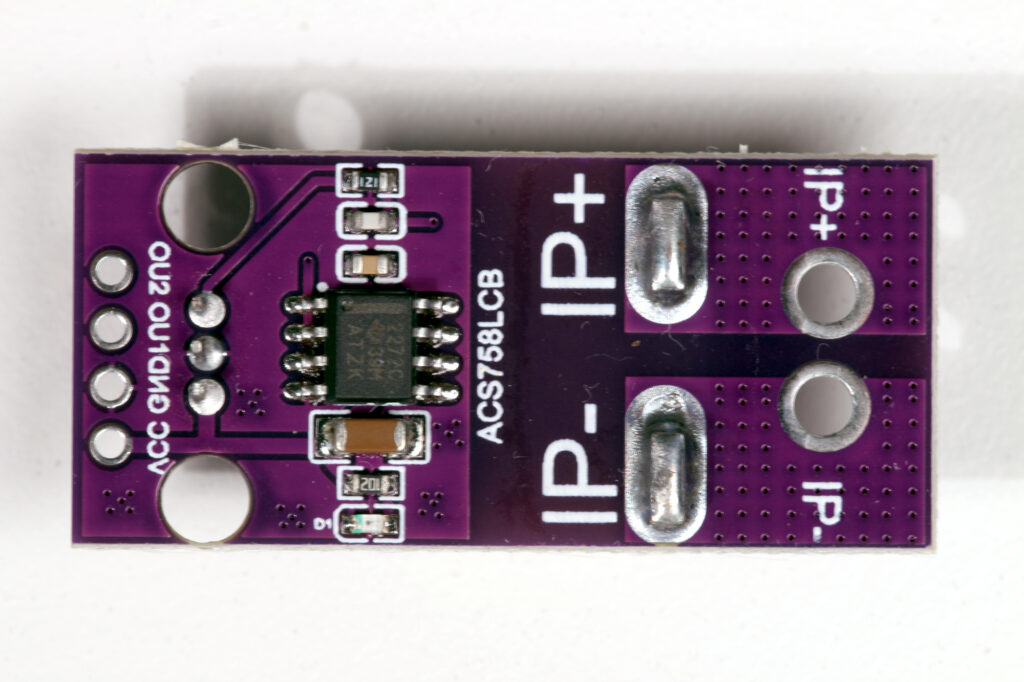
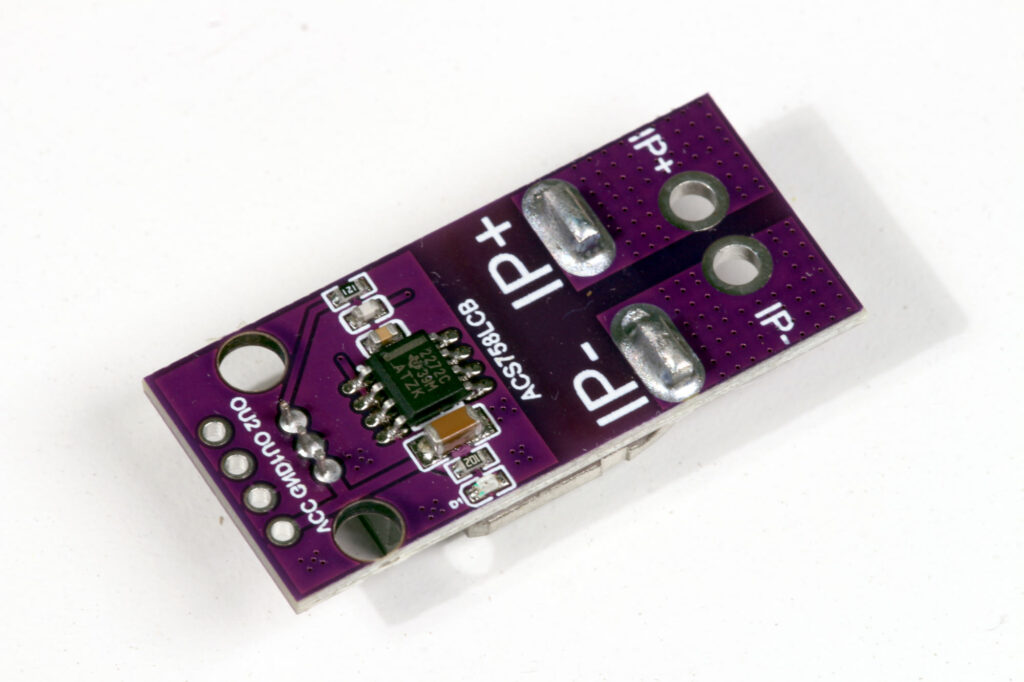
}Modul Sensor Arus ACS758
Berikut ini beberapa foto modul pengukur arus ACS758 yang menggunakan Hall-Effect sensor di dalamnya.
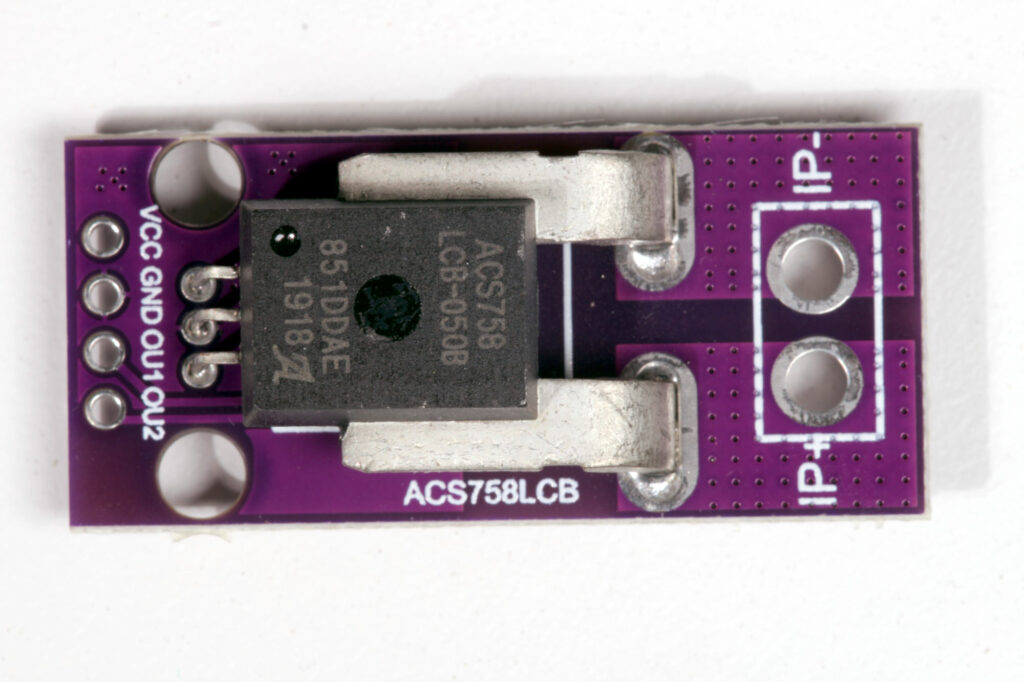
Beberapa literatur untuk mempelajari ACS758:
- Article on ACS758 breakout board https://www.best-microcontroller-projects.com/acs758.html
- Datasheet ACS758 https://www.best-microcontroller-projects.com/support-files/acs758.pdf
- Perbandingan berbagai cara untuk mengukur arus https://datacapturecontrol.com/articles/io-components/sensors/current
Perhitungan Daya Speaker Aktif Dengan Baterai
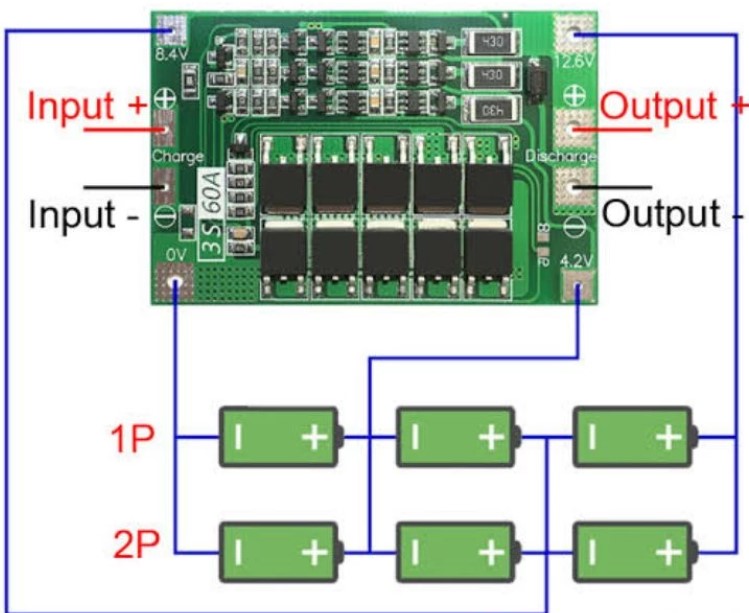
Suatu speaker aktif 12V dapat diberi daya dari adaptor 12V maupun menggunakan baterai. Jika menggunakan baterai yang bisa diisi ulang seperti Li-Ion, sebaiknya menggunakan komponen BMS (Battery Management System) supaya penggunaan baterai lebih baik.
Berikut ini contoh penggunaan BMS dengan 6 baterai.
BMS memiliki beberapa fungsi berikut ini:
- Pengaman untuk charging, supaya tidak terjadi overcharge, ataupun kesalahan arus/ tegangan untuk pengisian
- Memastikan tegangan pada baterai yang diseri seimbang. Baterai yang telah diisi ulang berkali-kali dapat saja mengalami perubahan tegangan karena kecepatan pengisian pada setiap baterai berbeda.
- Pengaman kalau baterai sudah habis. Baterai isi ulang biasanya bisa rusak kalau dipaksa dipakai walaupun sudah habis isinya.
Berikut ini perhitungan durasi pemakaian baterai tersebut. Asumsi:
- speaker aktif mendapatkan energi dari baterai dengan BMS 40A
- jumlah baterai yang dipakai 6 buah
- susunan baterai seri paralel, paralel 2, diseri 3.
- tegangan baterai 4,2 volt (tegangan 18650 bisa dari 3,7 volt sampai 4,2 volt)
- kapasitas baterai 2600 mAh
Pertanyaan:
(1) berapa lama mampu dipakai untuk menyalakan speaker aktif 30 watt
(2) jika speaker aktif tersebut menggunakan adaptor, perlu berapa ampere
Jawaban (1):
Jika dianggap efisiensi amplifier adalah 100%, maka perhitungan sebagai berikut:
energi setiap baterai = tegangan baterai (volt) x kapasitas muatan baterai (Ah)
jumlah energi di semua baterai = 6 x tegangan baterai x kapasitas baterai
total energi tersimpan di baterai = 6 x 4,2 volt x 2600 mAh = 10,92 VAh = 65,52 Wh
waktu = energi / daya = 65,52 Wh / 30 watt = 2,184 jam = 2 jam 11 menit
Dalam prakteknya efisiensi amplifier bisa antara 50% ~ 90%, jadi durasi penggunaannya akan kurang dari 2 jam 11 menit.
Jika misalkan efisiensi = 50%, maka durasi akan menjadi: 2,184 jam x 50% = 1,092 jam
Jawaban (2)
Daya 30 watt
tegangan 12 volt
asumsi efisiensi 100% (semua daya dari adaptor menjadi energi suara)
daya = tegangan x arus
P = V x I
daya dan tegangan diketahui, tinggal menghitung arus.
I = P / V = 30 watt / 12 ampere = 2,5 ampere
Jadi diperlukan adaptor 2,5 ampere
Dalam prakteknya akan ada inefisiensi, jadi lebih baik pakai adaptor yang lebih dari 2,5 ampere
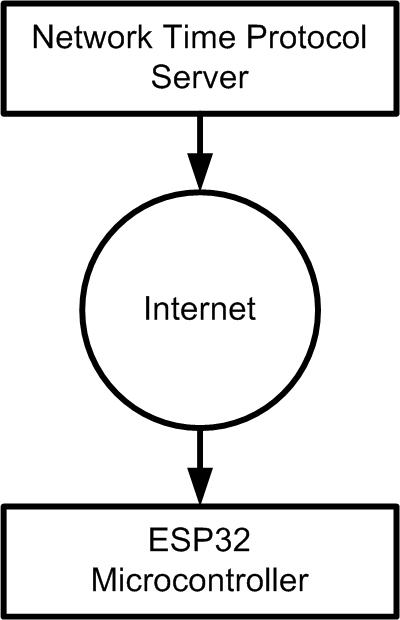
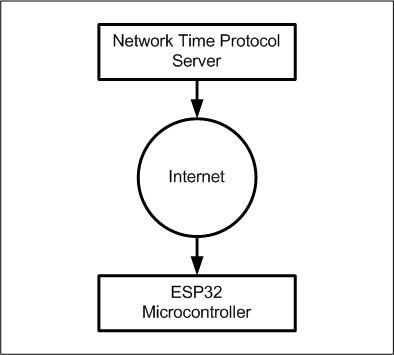
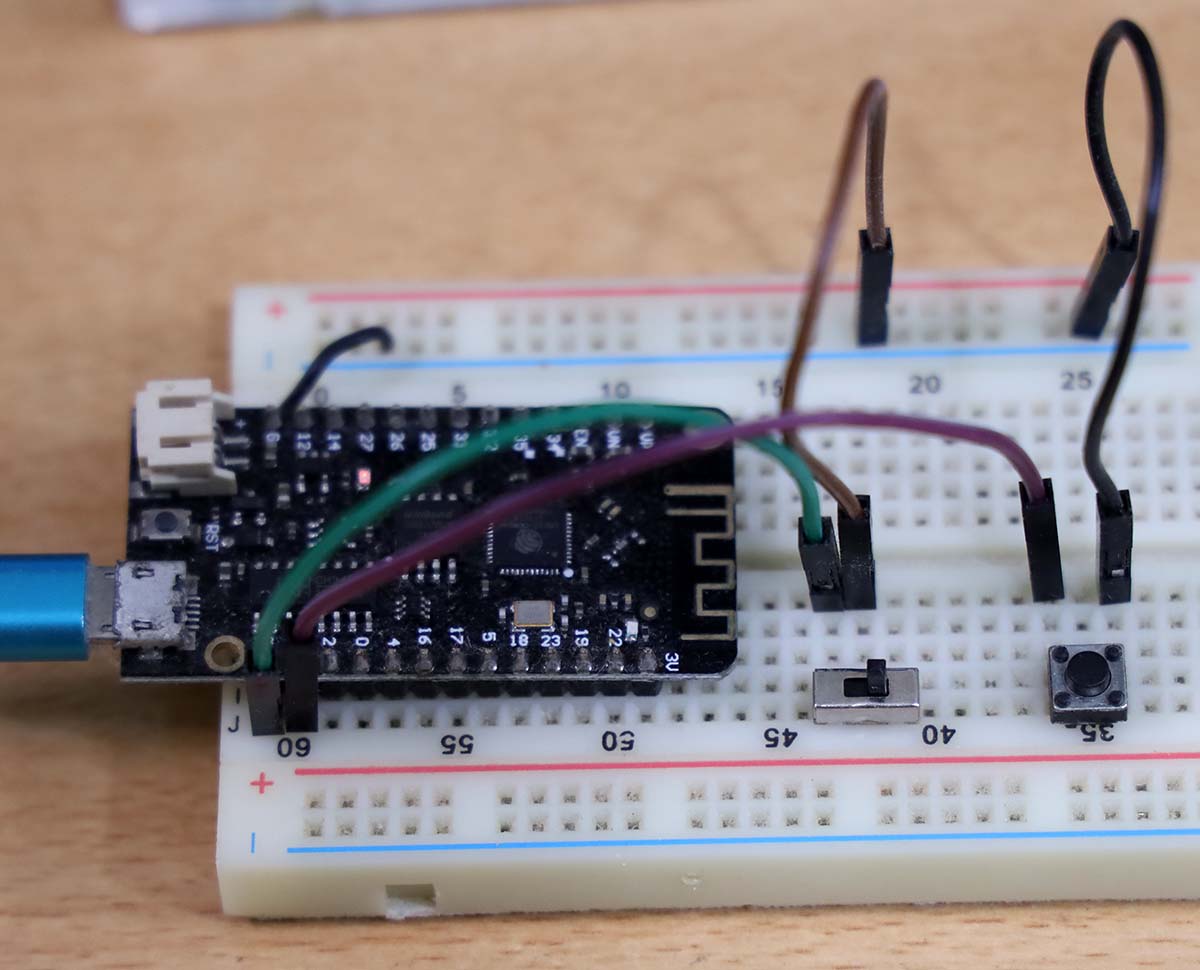
Sinkronisasi Waktu Dengan Network Time Protocol (NTP) pada Mikrokontroler ESP32
NTP (Network Time Protocol) adalah protokol komunikasi di jaringan komputer untuk sinkronisasi waktu melalui jaringan komputer. Sinkronisasi waktu ini penting pada aplikasi-aplikasi yang berbasis pewaktuan yang tepat, misalnya pencatatan ataupun untuk koordinasi aktivitas di suatu sistem berbasis IoT (Internet of Things).
ESP32 adalah mikrokontroler yang memiliki fitur Wi-Fi yang memungkinkan untuk tersambung ke jaringan komputer, termasuk ke suatu server NTP. ESP32 dapat menggunakan protokol NTP untuk sinkronisasi waktu dengan server NTP. Proses ini menyederhanakan kalibrasi waktu di ESP32. Alternatif lainnya adalah menggunakan RTC (real time clock) yaitu jam digital yang dibackup dengan baterai, ataupun dengan setting waktu secara manual. Teknik RTC perlu komponen tambahan, sedangkan setting manual memerlukan waktu dan tenaga. Selain itu sumber waktu di ESP32 juga tidak sepresisi sumber waktu di server NTP, sehingga setelah beberapa waktu maka jam di ESP32 akan bergeser dari setting awal.
Untuk mengakses NTP dari ESP32 dapat menggunakan library yang sudah ada, jadi tidak perlu lagi koding protokol secara dari nol. Library yang umum dipakai ada 2 macam yaitu:
- Arduino Library NTPClient untuk Arduino. Library ini dapat dipakai di semua mikrokontroler Arduino.
- Arduino ESP32 NTP untuk ESP32. Library ini hanya dapat dipakai untuk ESP32.
Persiapan
Sebelum menjalankan program NTP ini, ada beberapa hal yang perlu diperhatikan:
- Arduino IDE sudah diinstal di desktop/laptop, dan libraray Arduino-ESP32 sudah diaktifkan
- Konfigurasi ESP32 sudah diujicoba dengan program sederhana, misalnya lampu kedip (Blink)
- Wi-Fi akses point dapat mengakses internet tersedia, dan juga sudah disiapkan nama akses point dan passwordnya.
- Pahami zona waktu tempat anda. NTP memberikan waktu dengan standar GMT+0, jadi perlu disesuaikan jika anda memerlukan waktu lokal.
Arduino NTPClient
Cara pertama adalah menggunakan library NTPClient Arduino. Library ini dicantumkan di laman NTPClient di situs Arduino, namun tidak ada penjelasan sama sekali di situs tersebut. Untuk cara penggunaannya kita perlu melihat repository NTPClient di github. Contoh penggunaan ada di direktori /examples di repository tersebut.
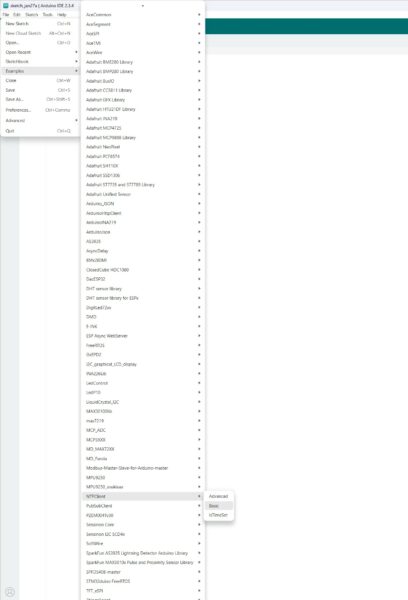
Contoh kode juga dapat diakses dari Arduino IDE, dari menu File -> Examples -> NTPClient. Namun sedikit repot, karena daftar Examples cukup banyak dan urutannya tidak tepat abjad. Berikut ini tampilan menunya di Arduino IDE. (klik untuk gambar yang lebih besar).
Kode yang mudah dipakai adalah yang ‘Basic’ , namun kode ini perlu diubah sedikit seperti pada listing kode berikut ini.
#include <NTPClient.h>
// change next line to use with another board/shield
//#include <ESP8266WiFi.h>
#include <WiFi.h> // for WiFi shield
//#include <WiFi101.h> // for WiFi 101 shield or MKR1000
#include <WiFiUdp.h>
const char *ssid = "AP_NAME";
const char *password = "AP_PASSWORD";
WiFiUDP ntpUDP;
NTPClient timeClient(ntpUDP);
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
timeClient.begin();
}
void loop() {
timeClient.update();
Serial.println(timeClient.getFormattedTime());
delay(1000);
}Perubahan yang dilakukan adalah sebagai berikut:
- Kode ini awalnya untuk ESP8266. Untuk dipakai di ESP32 maka header file mesti diganti, dari “ESP8266WiFi.h” menjadi “WiFi.h”
- Sesuaikan nama SSID untuk akses point
- Sesuaikan password untuk mengakses akses point. Perhatikan bahwa program NTP ini hanya dapat berfungsi jika ESP32 tersambung ke internet. Jadi pastikan Wi-Fi access point tersambung ke internet atau bisa juga menggunakan tethering ke smartphone
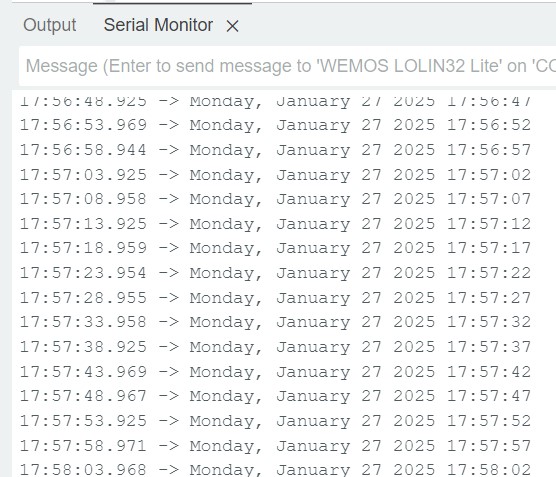
Berikut ini tampilan output ESP32 di serial monitor Arduino. Waktu adalah GMT+0, sedangkan di Indonesia adalah GMT+7, sehingga jam yang ditampilkan berbeda 7 jam.
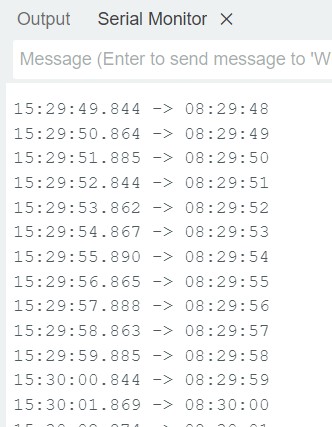
Program di atas menampilkan waktu dalam UTC atau GMT+0. Untuk menampilkan dalam waktu lokal seperti WIB (Waktu Indonesia bagian Barat), gunakan fungsi setTimeOffset() untuk menambah/mengurangi waktu yang ditampilkan. Untuk WIB, waktu yang ditambah dalam detik adalah 7 x 60 x 60. Programnya menjadi sebagai berikut:
#include <NTPClient.h>
// change next line to use with another board/shield
//#include <ESP8266WiFi.h>
#include <WiFi.h> // for WiFi shield
//#include <WiFi101.h> // for WiFi 101 shield or MKR1000
#include <WiFiUdp.h>
const char *ssid = "AP_NAME";
const char *password = "AP_PASSWORD";
WiFiUDP ntpUDP;
NTPClient timeClient(ntpUDP);
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
timeClient.begin();
timeClient.setTimeOffset(7*60*60);
}
void loop() {
timeClient.update();
Serial.println(timeClient.getFormattedTime());
delay(1000);
}Beberapa hal yang dapat diambil/diubah dengan member function di di class NTPClient :
- SetPoolServerName() : mengubah NTP server dari default pool.ntp.org
- isTimeSet() : apakah berhasil mengambil waktu dari NTP server
- getDay() : ambil hari dalam minggu (0 = minggu)
- getHours() : ambil waktu jam
- getMinutes() : ambil waktu menit
- getSeconds() : ambil waktu detik
- setTimeOffset() : menambah/mengurangi offset waktu yang ditampilkan dalam detik
- getFormattedTime() : waktu terformat dalam bentuk string
- getEpochTime() : jumlah detik sejak 1 Januari 1970
Arduino ESP32 NTP Library
Library ini adalah bagian dari Arduino ESP32, jadi hanya dapat dipakai di ESP32.
Fungsi-fungsi penting adalah:
- getLocalTime() untuk mendapatkan waktu
- configTime() untuk setting NTP
- configTzTime() untuk set timezone
Contoh kode diambil dari contoh program SimpleTime.ino di repository arduino-esp32 .
Daftar timezone yang dapat dipakai dapat dilihat di https://github.com/esp8266/Arduino/blob/master/cores/esp8266/TZ.h
Berikut ini adalah kode yang sudah dimodifikasi:
// sumber: libraries/ESP32/examples/Time/SimpleTime/SimpleTime.ino
// URL: https://github.com/espressif/arduino-esp32/blob/496b8411773243e1ad88a68652d6982ba2366d6b/libraries/ESP32/examples/Time/SimpleTime/SimpleTime.ino
// dimodifikasi untuk WIB (GMT+7)
#include <WiFi.h>
#include "time.h"
#include "esp_sntp.h"
const char *ssid = "AP_NAME";
const char *password = "AP_PASSWORD";
const char *ntpServer1 = "pool.ntp.org";
const char *ntpServer2 = "time.nist.gov";
const long gmtOffset_sec = 3600;
const int daylightOffset_sec = 3600;
//const char *time_zone = "CET-1CEST,M3.5.0,M10.5.0/3"; // TimeZone rule for Europe/Rome including daylight adjustment rules (optional)
const char *time_zone = "WIB-7"; // Indonesia WIB
void printLocalTime() {
struct tm timeinfo;
if (!getLocalTime(&timeinfo)) {
Serial.println("No time available (yet)");
return;
}
Serial.println(&timeinfo, "%A, %B %d %Y %H:%M:%S");
}
// Callback function (gets called when time adjusts via NTP)
void timeavailable(struct timeval *t) {
Serial.println("Got time adjustment from NTP!");
printLocalTime();
}
void setup() {
Serial.begin(115200);
// First step is to configure WiFi STA and connect in order to get the current time and date.
Serial.printf("Connecting to %s ", ssid);
WiFi.begin(ssid, password);
/**
* NTP server address could be acquired via DHCP,
*
* NOTE: This call should be made BEFORE esp32 acquires IP address via DHCP,
* otherwise SNTP option 42 would be rejected by default.
* NOTE: configTime() function call if made AFTER DHCP-client run
* will OVERRIDE acquired NTP server address
*/
esp_sntp_servermode_dhcp(1); // (optional)
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println(" CONNECTED");
// set notification call-back function
sntp_set_time_sync_notification_cb(timeavailable);
/**
* This will set configured ntp servers and constant TimeZone/daylightOffset
* should be OK if your time zone does not need to adjust daylightOffset twice a year,
* in such a case time adjustment won't be handled automagically.
*/
configTime(gmtOffset_sec, daylightOffset_sec, ntpServer1, ntpServer2);
/**
* A more convenient approach to handle TimeZones with daylightOffset
* would be to specify a environment variable with TimeZone definition including daylight adjustmnet rules.
* A list of rules for your zone could be obtained from https://github.com/esp8266/Arduino/blob/master/cores/esp8266/TZ.h
*/
configTzTime(time_zone, ntpServer1, ntpServer2);
}
void loop() {
delay(5000);
printLocalTime(); // it will take some time to sync time :)
}
Penyesuaian yang dilakukan adalah sebagai berikut:
- Timezone diganti menjadi Waktu Indonesia bagian Barat (WIB-7)
Berikut ini output program di serial terminal
Kedua library tersebut fungsinya mirip-mirip. Library ESP32 memiliki fitur lebih banyak dan lebih cocok untuk dijalankan di ESP32.
Saran & Penyempurnaan
Contoh program NTP yang disajikan adalah program yang sangat minimalis untuk menunjukkan konsep NTP. Pada kondisi sesungguhnya, sistem mikrokontroler IoT ini akan menghadapi berbagai masalah, sehingga perlu ditambahkan penanganan beberapa kasus berikut:
- Koneksi ESP32 ke server NTP tidak stabil, baik di local network maupun di internetnya.
- Pada program perlu ditambahkan error handling jika terjadi koneksi internet putus ataupun koneksi Wi-Fi putus. Jika koneksi Wi-Fi putus, maka perlu ada prosedur untuk melakukan rekoneksi ulang ke akses point Wi-Fi. Jadi tidak perlu reset manual.
- Pengubahan konfigurasi nama akses point dan password akses point secara software dengan interface tertentu. Pada contoh ini nama dan password dikodekan langsung di source code sehingga tidak dapat diubah. Pada kondisi nyata seharusnya dapat diubah oleh pemakai tanpa perlu mengubah source code.
Literatur
- Wikipedia : Network Time Protocol https://en.wikipedia.org/wiki/Network_Time_Protocol
Op Amp Populer
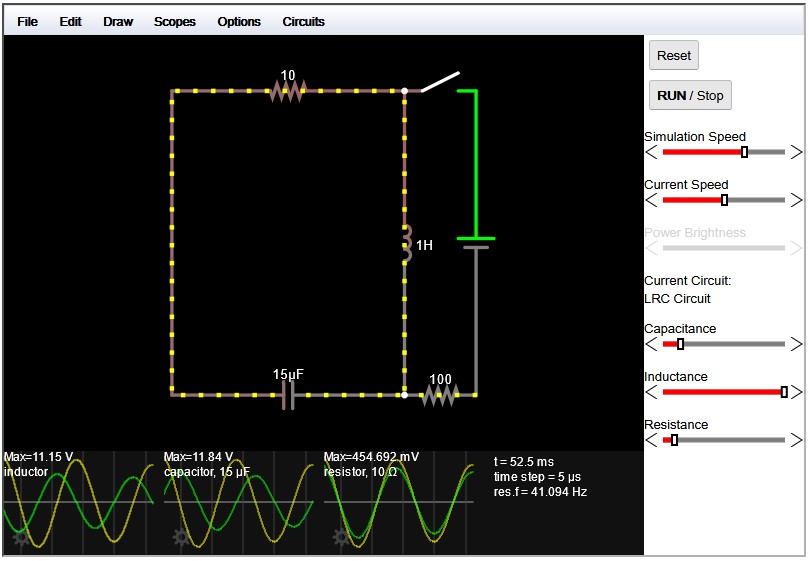
Simulasi Rangkaian Elektrik Online
Falstadt, simulator rangkaian elektrik Online. Antar mukanya menggunakan graphical, jadi sangat mudah. Visualisasi arus di setiap kabel juga bagus.
Falstadt
Simulator ESP32
- Wokwi, mengklaim sebagai “World’s most advanced ESP32 simulator”. Dapat melakukan simulasi Arduino (Uno, Mega, Nano), ESP32, STM32 dan Pi Pico. Ada versi onlinenya di website Wokwi, dan ada juga versi offline yang dapat diinstall di VS Code / JetBrains (berbayar). Ada juga versi Wokwi Pro (berbayar) yang dapat diintegrasikan ke CI (Continous Integration).
Komponen Grounding
Berikut ini beberapa komponen yang diperlukan untuk memasang grounding perangkat:
- Grounding Rod : jumlah sesuai kedalaman yang diperlukan
- Ground Clamp: dipakai untuk menyambung grounding rod ke kabel grounding
- Ground Bus Bar : untuk membuat percabangan kabel grounding ke perangkat-perangkat yang memerlukan
- Kabel Grounding dari bahan tembaga
Filter Analog yang dapat diprogram
Saya sedang mencari-cari ide rangkaian untuk membuat filter analog yang frekuensi cut-off nya dapat diprogram secara digital. Tujuannya jangka pendek adalah untuk filter anti aliasing dan reconstruction filter untuk suatu pengolahan sinyal digital.
Beberapa artikel berisi ide yang sudah didapat:
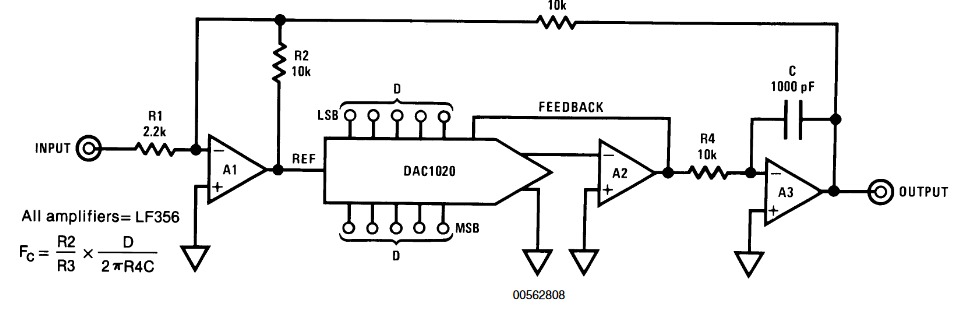
Ide rangkaian dari “Application Note 269 Circuit Applications of Multiplying CMOS D to A Converters”
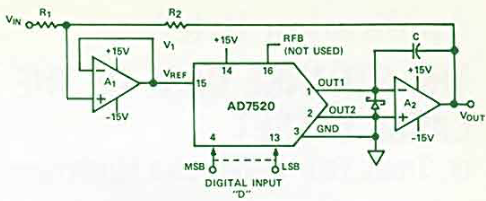
Ide rangkaian dari Application Note: “Application Ideas for Multiplying DAC’s Digital Controlled Gain is Useful in Filter Circuits”
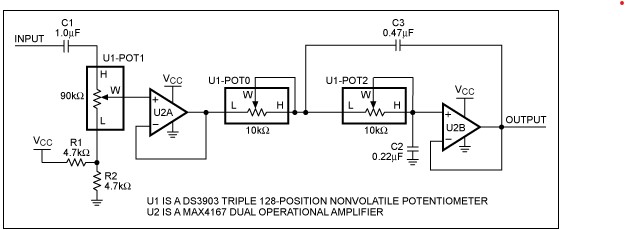
Ide dari “”A Digitally Controllable Lowpass Filter Using a Digital Potentiometer”
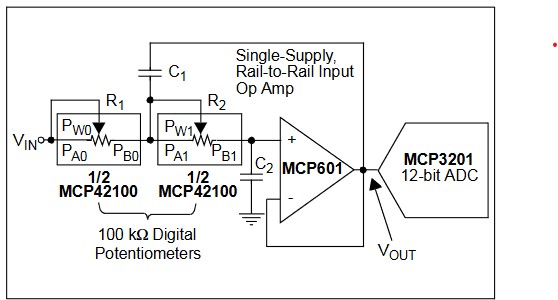
Ide dari Microchip: AN737 Using Digital Potentiometers to Design Low Pass Adjustable Filters.
Rangkaian ini berisi 2 buah potensiometer digital (MCP42100) , opamp MCP601 (single supply, rail to rail). Konfigurasi filter yang dipakai adalah Sallen-key orde 2, low-pass filter.
Referensi
- DS3903 “Triple 128-Position Nonvolatile Digital Potentiometer”
- Microchip: AN737 Using Digital Potentiometers to Design Low Pass Adjustable Filters
- Application Note: “Application Ideas for Multiplying DAC’s Digital Controlled Gain is Useful in Filter Circuits” https://schematicsforfree.com/files/Analog/Misc/Digitally%20Controlled%20Analog%20Gain%20Control.pdf , berisi beberapa aplikasi Multiplying DAC , termasuk di antaranya adalah programmable analog filter
-
- “A Digitally Controllable Lowpass Filter Using a Digital Potentiometer”
- MCP601, single supply CMOS Op Amps
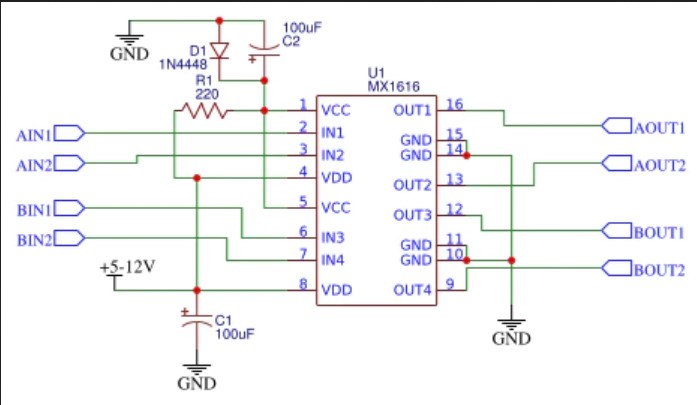
Driver Motor MX1616
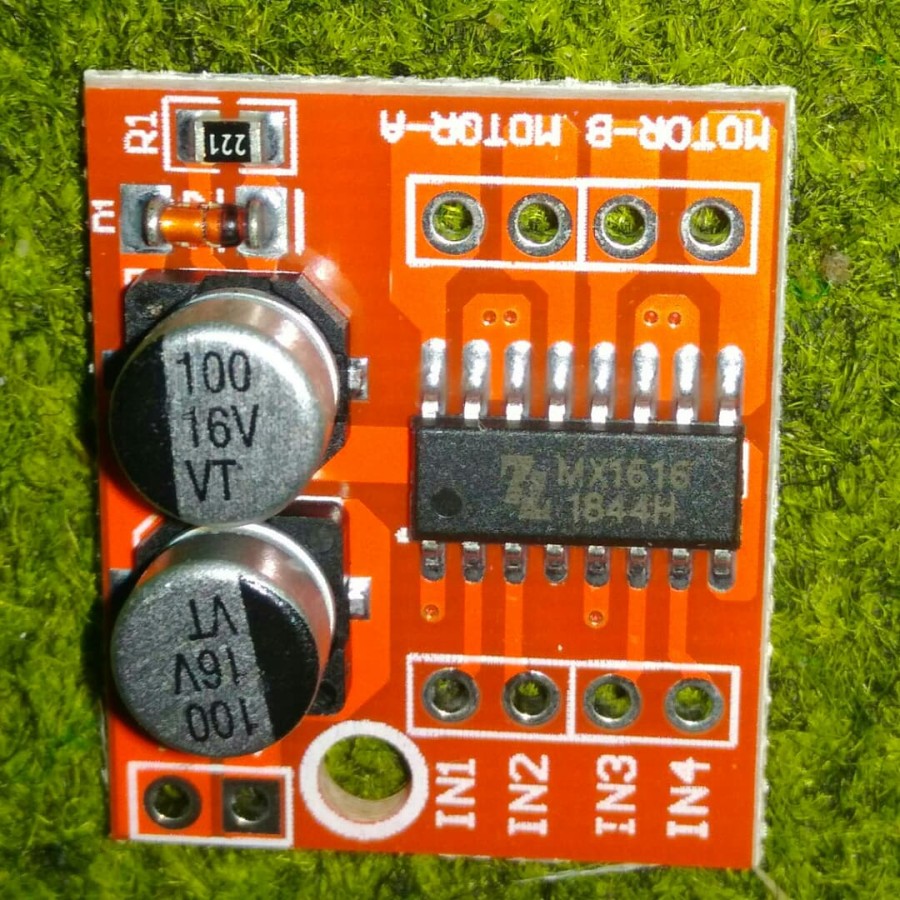
Skema Modul MX1616
Literatur
- Datasheet MX1616H
- Tutorial for Arduino Mini DC Motor Driver Dual H-Bridge PWM Control
- MX1616 H-Bridge DC Motor Driver
Nilai Resistor dan Kapasitor untuk Rangkaian Operational Amplifier
Panduan pemilihan nilai resissor dan kapasitor untuk rangkaian dengan op-amp:
- Nilai resistor antara 1k ~ 100kΩ
- Nilai kapasitor antara 1 nF ~ beberapa μF
Kutipan:
Resistor values should stay within the range of 1–100 kΩ. The lower limit avoids excessive current draw from the op amp output, which is particularly important for single-supply op amps in power-sensitive applications. Those amplifiers have typical output currents of between 1 mA and 5 mA. At a supply voltage of 5 V, this current translates to a minimum of 1 kΩ.
The upper limit of 100 kΩ is to avoid excessive resistor noise.
Capacitor values can range from 1 nF to several μF. The lower limit avoids coming too close to parasitic capacitances. If the common-mode input capacitance of the op amp, used in a Sallen–Key filter section, is close to 0.25% of C1, (C1/400), it must be considered for accurate filter response. The MFB topology, in comparison, does not require input-capacitance compensation.
Sumber:
- https://www.sciencedirect.com/topics/engineering/resistor-value
- https://www.sciencedirect.com/book/9780128116487/op-amps-for-everyone
Error pada ESP32: Guru Meditation Error: Core 1 panic’ed (Interrupt wdt timeout on CPU1).
Salah satu pesan kesalahan yang dapat muncul pada ESP32 adalah “Guru Meditation Error: Core 1 panic’ed (Interrupt wdt timeout on CPU1)”. Salah satu penyebabnya adalah memanggil Serial.print() dari interupsi
Berikut ini pesan kesalahan yang muncul pada ESP32
Guru Meditation Error: Core 1 panic'ed (Interrupt wdt timeout on CPU1).
Core 1 register dump:
PC : 0x4008ab86 PS : 0x00060535 A0 : 0x80089afe A1 : 0x3ffbf19c
A2 : 0x3ffbd448 A3 : 0x3ffbd2d8 A4 : 0x00000004 A5 : 0x00060523
A6 : 0x00060523 A7 : 0x00000001 A8 : 0x3ffbd2d8 A9 : 0x00000018
A10 : 0x3ffbd2d8 A11 : 0x00000018 A12 : 0x00000004 A13 : 0x00060523
A14 : 0x007bf318 A15 : 0x003fffff SAR : 0x0000000a EXCCAUSE: 0x00000006
EXCVADDR: 0x00000000 LBEG : 0x400863f9 LEND : 0x40086409 LCOUNT : 0xfffffffe
Core 1 was running in ISR context:
EPC1 : 0x400db223 EPC2 : 0x00000000 EPC3 : 0x00000000 EPC4 : 0x00000000
Backtrace: 0x4008ab83:0x3ffbf19c |<-CORRUPTED
Core 0 register dump:
PC : 0x4008ad1b PS : 0x00060035 A0 : 0x80089727 A1 : 0x3ffbea3c
A2 : 0x3ffbf318 A3 : 0xb33fffff A4 : 0x0000abab A5 : 0x00060023
A6 : 0x00060021 A7 : 0x0000cdcd A8 : 0x0000abab A9 : 0xffffffff
A10 : 0x3ffc1f58 A11 : 0x00000000 A12 : 0x3ffc1f54 A13 : 0x00000007
A14 : 0x007bf318 A15 : 0x003fffff SAR : 0x0000001d EXCCAUSE: 0x00000006
EXCVADDR: 0x00000000 LBEG : 0x00000000 LEND : 0x00000000 LCOUNT : 0x00000000
Backtrace: 0x4008ad18:0x3ffbea3c |<-CORRUPTED
ELF file SHA256: e85d33667e5fa1a7
Rebooting...Berikut ini contoh program yang menyebabkan kesalahan tersebut.
// https://www.arduino.cc/reference/en/libraries/esp32timerinterrupt/
#define LED_BUILTIN 22
hw_timer_t *My_timer = NULL;
int kerja_counter = 0;
int print_job = 0;
long int timer_delay = 1000000L; // clock timer= 1 MHz
void IRAM_ATTR onTimer() {
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
kerja_counter++;
Serial.print("Test ");
Serial.println(kerja_counter); // bad practice
}
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
Serial.begin(115200);
Serial.print(__FILE__);
Serial.print(F("\nStarting TimerInterruptTest on "));
Serial.println(ARDUINO_BOARD);
Serial.print(F("CPU Frequency = "));
Serial.print(F_CPU / 1000000);
Serial.println(F(" MHz"));
pinMode(LED_BUILTIN, OUTPUT);
My_timer = timerBegin(0, 80, true); // prescaler
timerAttachInterrupt(My_timer, &onTimer, true);
timerAlarmWrite(My_timer, timer_delay, true);
timerAlarmEnable(My_timer); //Just Enable
}
// the loop function runs over and over again forever
void loop() {
}
Solusi: Serial.print() dipanggil dari fungsi loop(), sedangkan interupsi hanya mempersiapkan datanya saja, atau menaruh data ke dalam suatu FIFO buffer.
Berikut ini contoh hasil modifikasi program di atas.
// https://www.arduino.cc/reference/en/libraries/esp32timerinterrupt/
#define LED_BUILTIN 22
hw_timer_t *My_timer = NULL;
int kerja_counter = 0;
int print_job = 0;
long int timer_delay = 1000000L; // clock timer= 1 MHz
void IRAM_ATTR onTimer() {
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
kerja_counter++;
print_job=1;
}
// the setup function runs once when you press reset or power the board
void setup() {
// initialize digital pin LED_BUILTIN as an output.
Serial.begin(115200);
Serial.print(__FILE__);
Serial.print(F("\nStarting TimerInterruptTest on "));
Serial.println(ARDUINO_BOARD);
Serial.print(F("CPU Frequency = "));
Serial.print(F_CPU / 1000000);
Serial.println(F(" MHz"));
pinMode(LED_BUILTIN, OUTPUT);
My_timer = timerBegin(0, 80, true); // prescaler
timerAttachInterrupt(My_timer, &onTimer, true);
timerAlarmWrite(My_timer, timer_delay, true);
timerAlarmEnable(My_timer); //Just Enable
sei();
}
// the loop function runs over and over again forever
void loop() {
if (print_job == 1) {
print_job = 0;
Serial.print("Test ");
Serial.println(kerja_counter);
}
}
Simulasi Kendali Digital
Simulasi Kendali Digital dengan Matlab Simulink
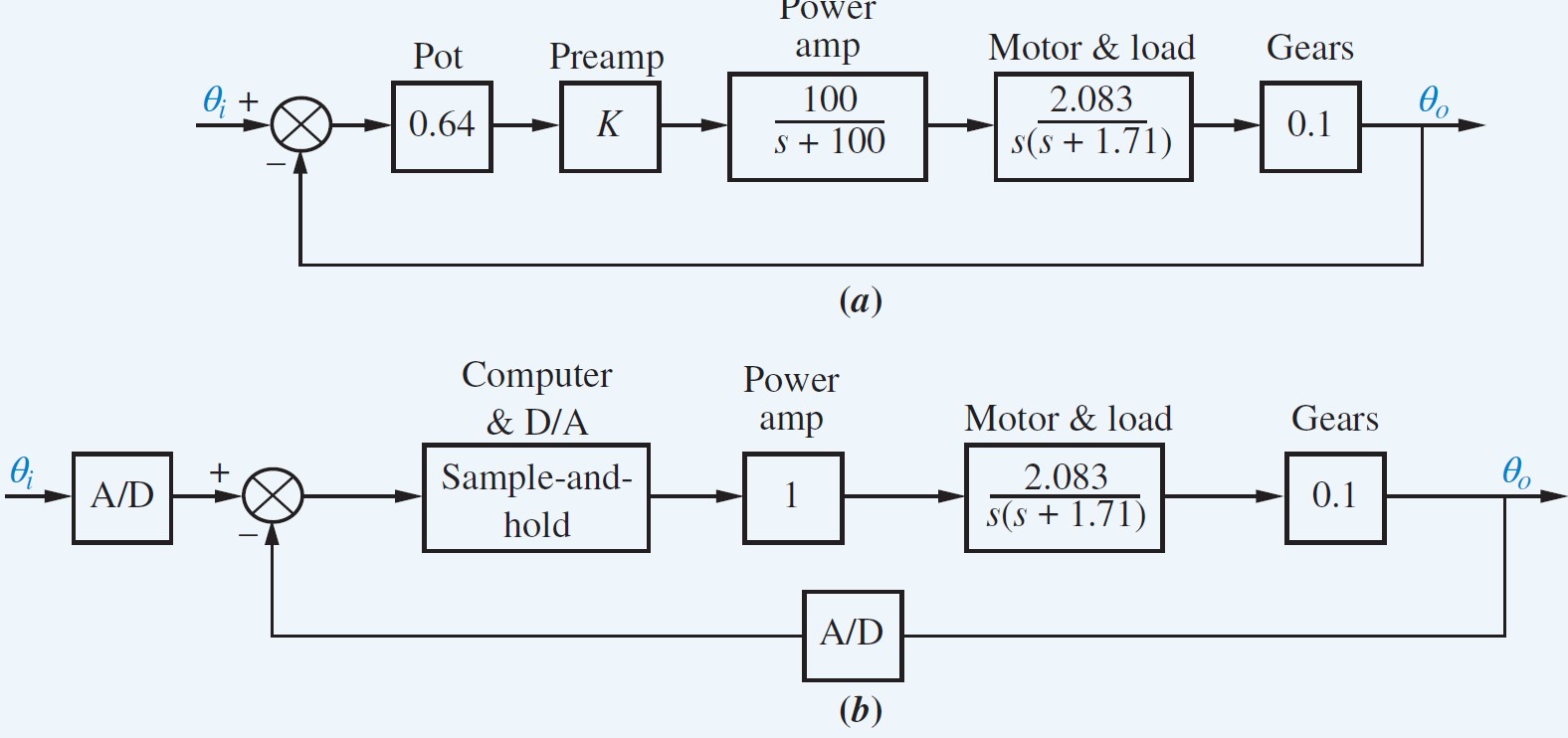
Problem: “Design the gain for the antenna azimuth position control system shown in
Figure 13.30(b) to yield a closed-loop damping ratio of 0.5. Assume a sampling interval
of T 0:1 second.”
 Blok diagram sistem dengan simulink sebagai berikut:
Blok diagram sistem dengan simulink sebagai berikut:
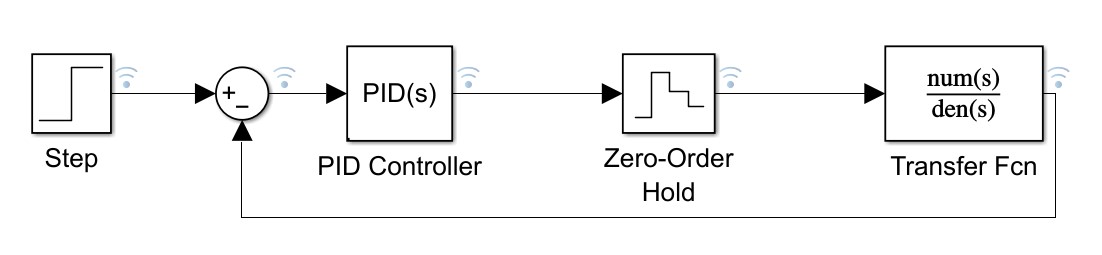 Fungsi transfer sistem dimasukkan ke blok “Transfer Fcn”
Fungsi transfer sistem dimasukkan ke blok “Transfer Fcn”
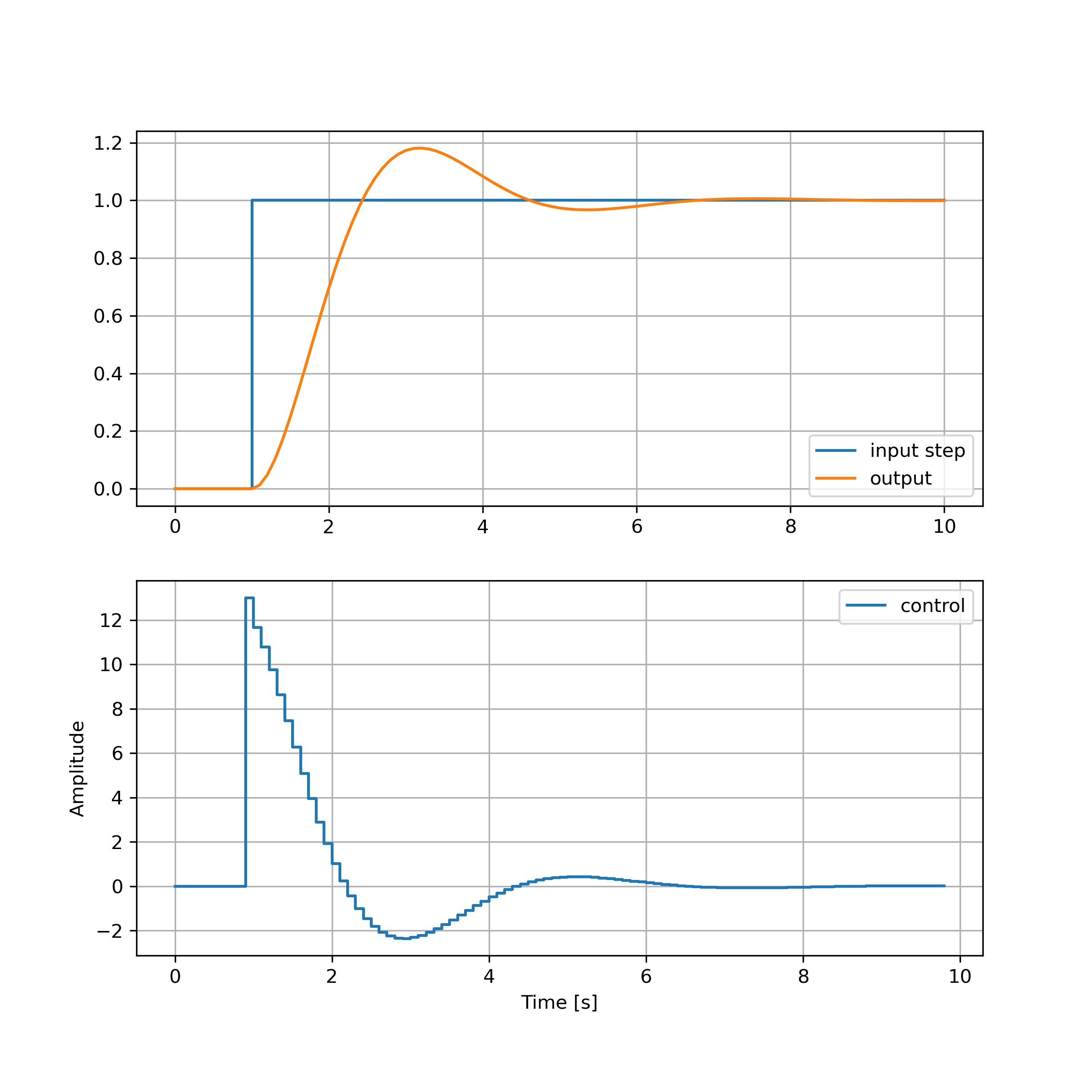
Respon sistem terhadap input step adalah sebagai berikut
Transformasi Bilinear
Respon Frekuensi LPF orde 1
Percobaan melihat pengaruh frekuensi sampling terhadap fungsi transfer sistem orde 1 low pass
Fungsi transfer sistem = 1/(s+1)
Time constant = 1, sehingga frekuensi cut off adalah 0.159 Hz
Gambar ilustrasi fungsi transfer untuk filter analog dan filter digital.
Filter digital dicoba dengan beberapa frekuensi sampling: 10 Hz, 100 Hz, 1000 Hz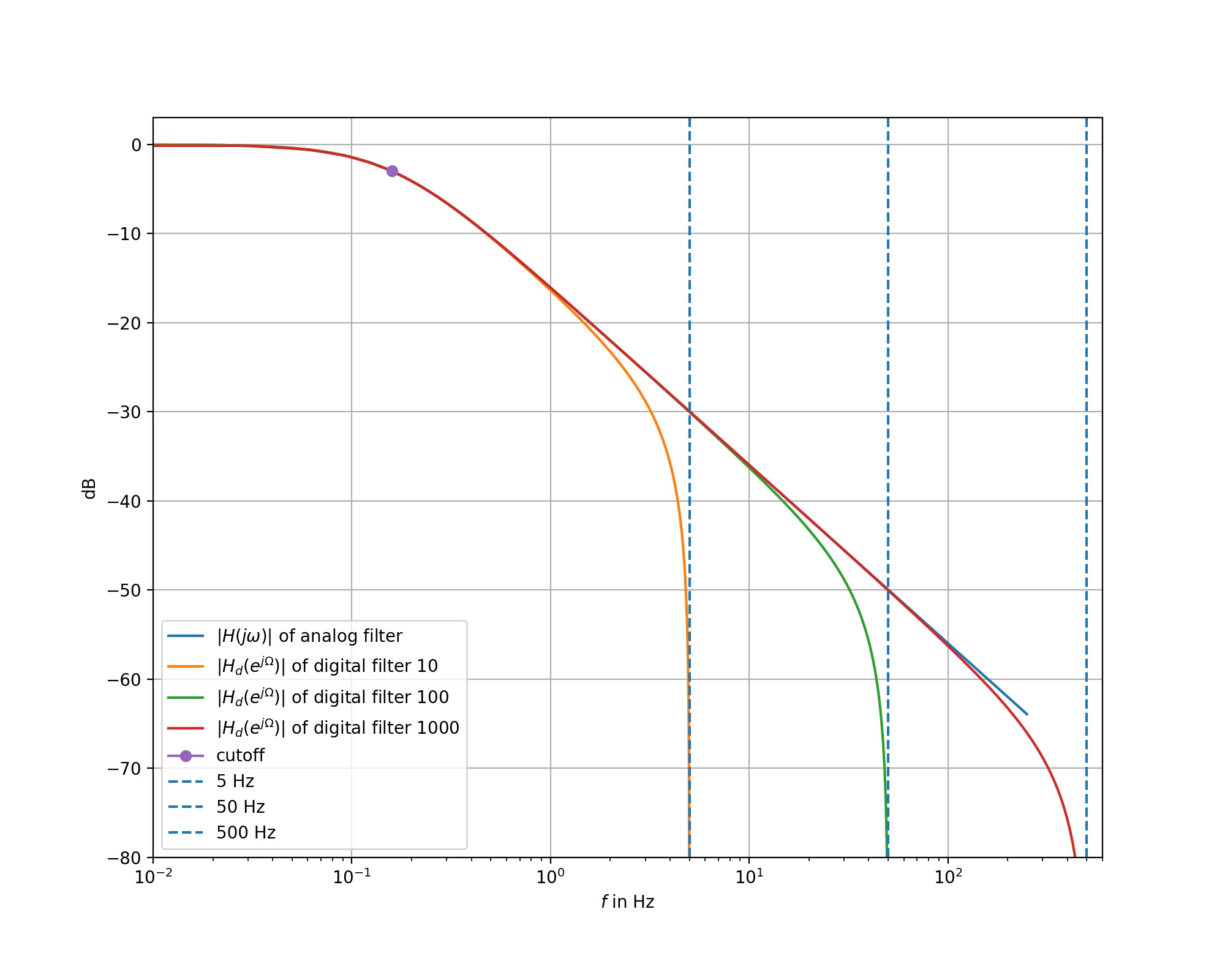
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
%matplotlib inline
B = [0, 1]
A = [1, 1]
fs10= 10
fs100= 100
fs1000= 1000
fs10_z = signal.bilinear(B,A,fs10)
fs100_z = signal.bilinear(B,A,fs100)
fs1000_z = signal.bilinear(B,A,fs1000)
fs10_a =fs10_z[1]
fs10_b =fs10_z[0]
fs100_a =fs100_z[1]
fs100_b =fs100_z[0]
fs1000_a=fs1000_z[1]
fs1000_b=fs1000_z[0]
# displaying
plt.figure(figsize=(10, 8))
Om, fs10_Hd = signal.freqz(fs10_b , fs10_a, worN=1024)
f10 = Om * fs10 / (2 * np.pi)
Om, fs100_Hd = signal.freqz(fs100_b , fs100_a, worN=2048)
f100 = Om * fs100 / (2 * np.pi)
Om, fs1000_Hd = signal.freqz(fs1000_b, fs1000_a, worN=16384) # 1000 Hz mesti lebih banyak sampelnya
f1000 = Om * fs1000 / (2 * np.pi)
tmp, H = signal.freqs(B, A, worN=f1000 * Om)
f = Om * f1000 / (2 * np.pi)
plt.semilogx(f, 20 * np.log10(np.abs(H)), label=r"$|H(j \omega)|$ of analog filter")
plt.semilogx(f10, 20 * np.log10(np.abs(fs10_Hd)), label=r"$|H_d(e^{j \Omega})|$ of digital filter 10")
plt.semilogx(f100, 20 * np.log10(np.abs(fs100_Hd)), label=r"$|H_d(e^{j \Omega})|$ of digital filter 100")
plt.semilogx(f1000, 20 * np.log10(np.abs(fs1000_Hd)), label=r"$|H_d(e^{j \Omega})|$ of digital filter 1000")
plt.semilogx(0.159, 20 * np.log10(0.707), marker='o',label="cutoff")
plt.axvline(x = 10/2, linestyle="--", label = '5 Hz')
plt.axvline(x = 100/2, linestyle="--", label = '50 Hz')
plt.axvline(x = 1000/2, linestyle="--", label = '500 Hz')
plt.xlabel(r"$f$ in Hz")
plt.ylabel(r"dB")
plt.axis([0.01, 600, -80, 3])
plt.legend()
plt.grid()
plt.savefig("first-order.jpg",dpi=200)
# https://www.geeksforgeeks.org/plot-a-vertical-line-in-matplotlib/Analisis
- frekuensi warping kelihatan di frekuensi yang makin dekat dengan 1/2 frekuensi sampling
- frekuensi cut off tidak terpengaruh
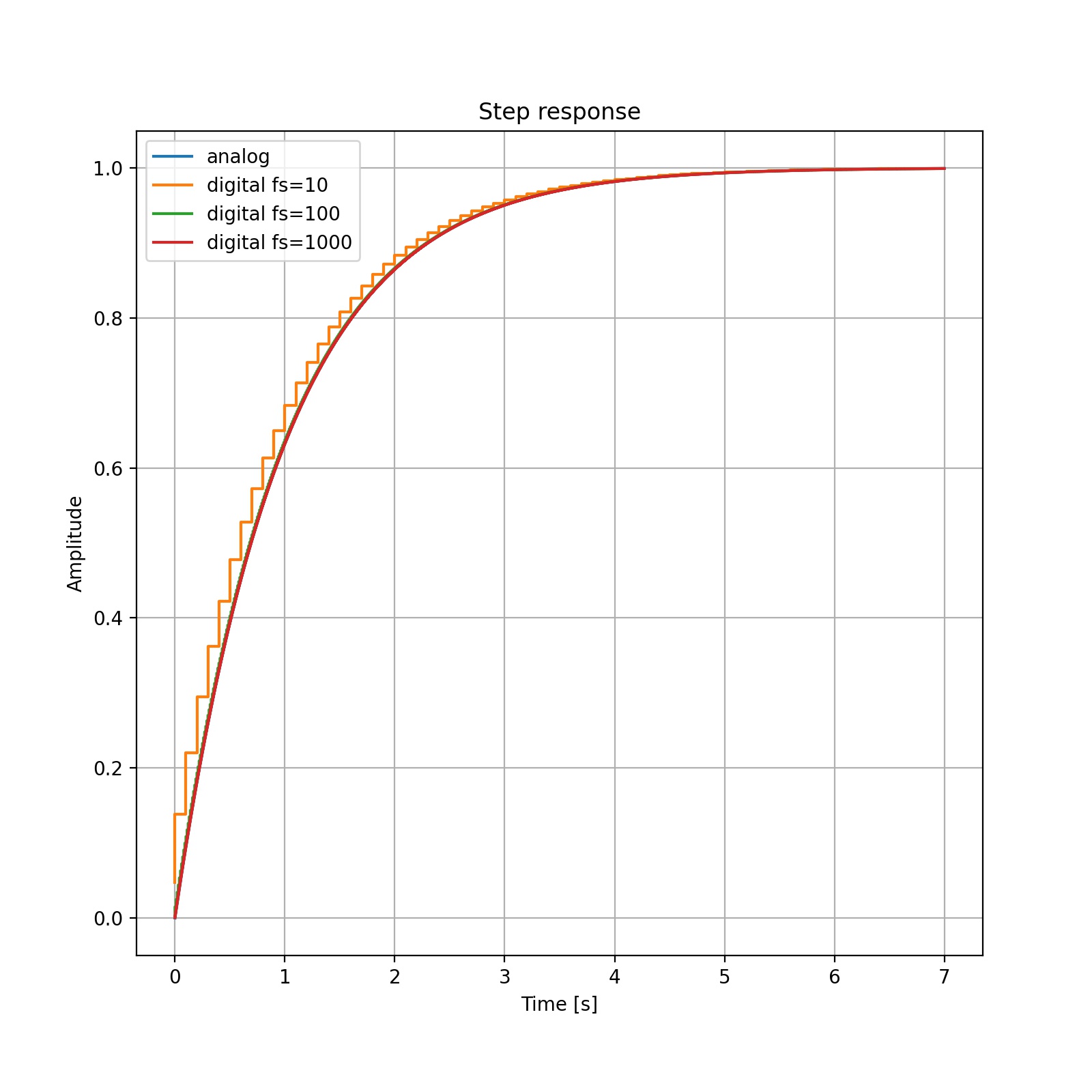
Respon Step Low Pass Filter orde 1
Respon Frekuensi High Pass Filter orde 1
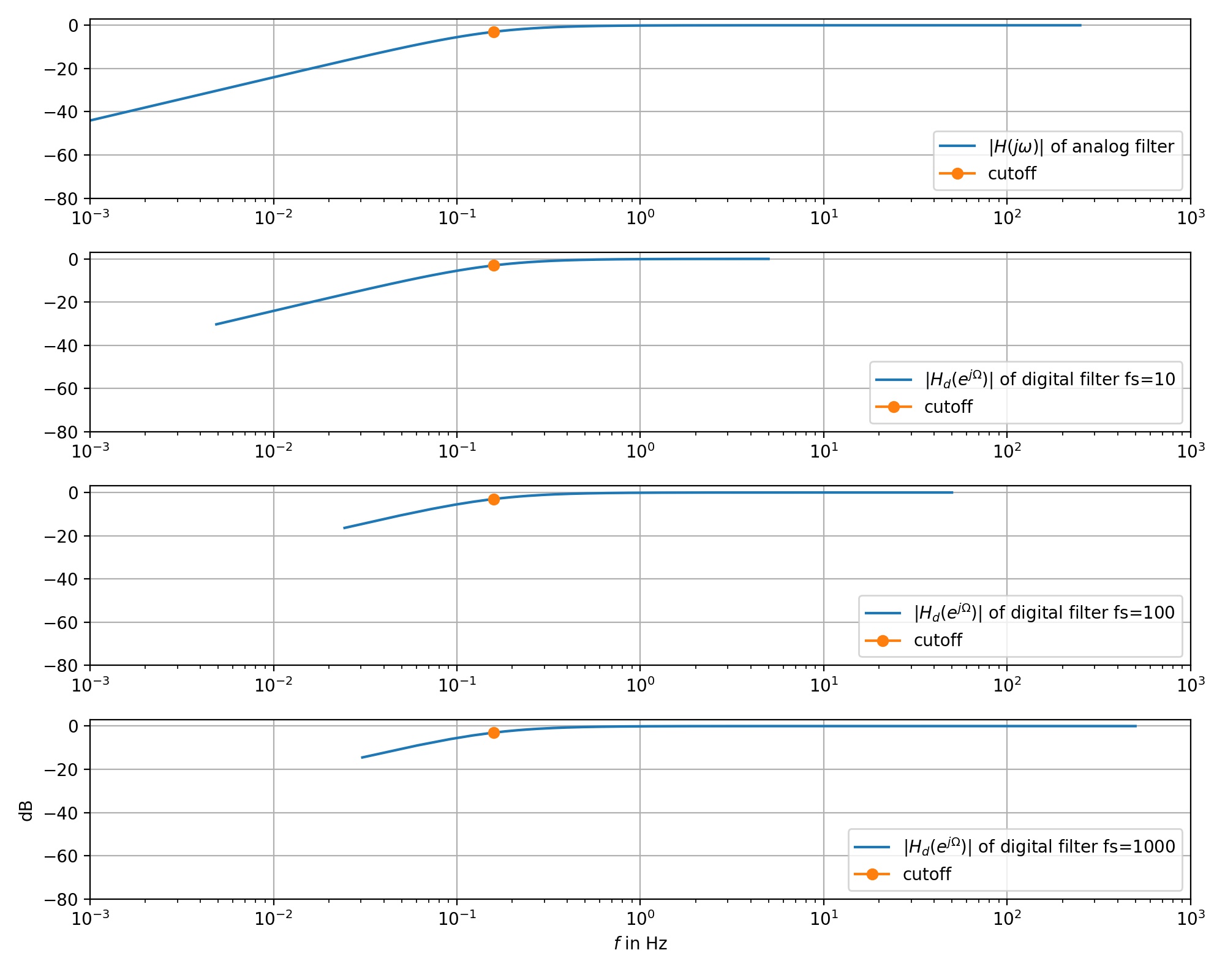 Kesimpulan:
Kesimpulan:
- perubahan frekuensi sampling tidak mengubah banyak respon frekuensi filter
Respon Step High Pass Filter orde 1
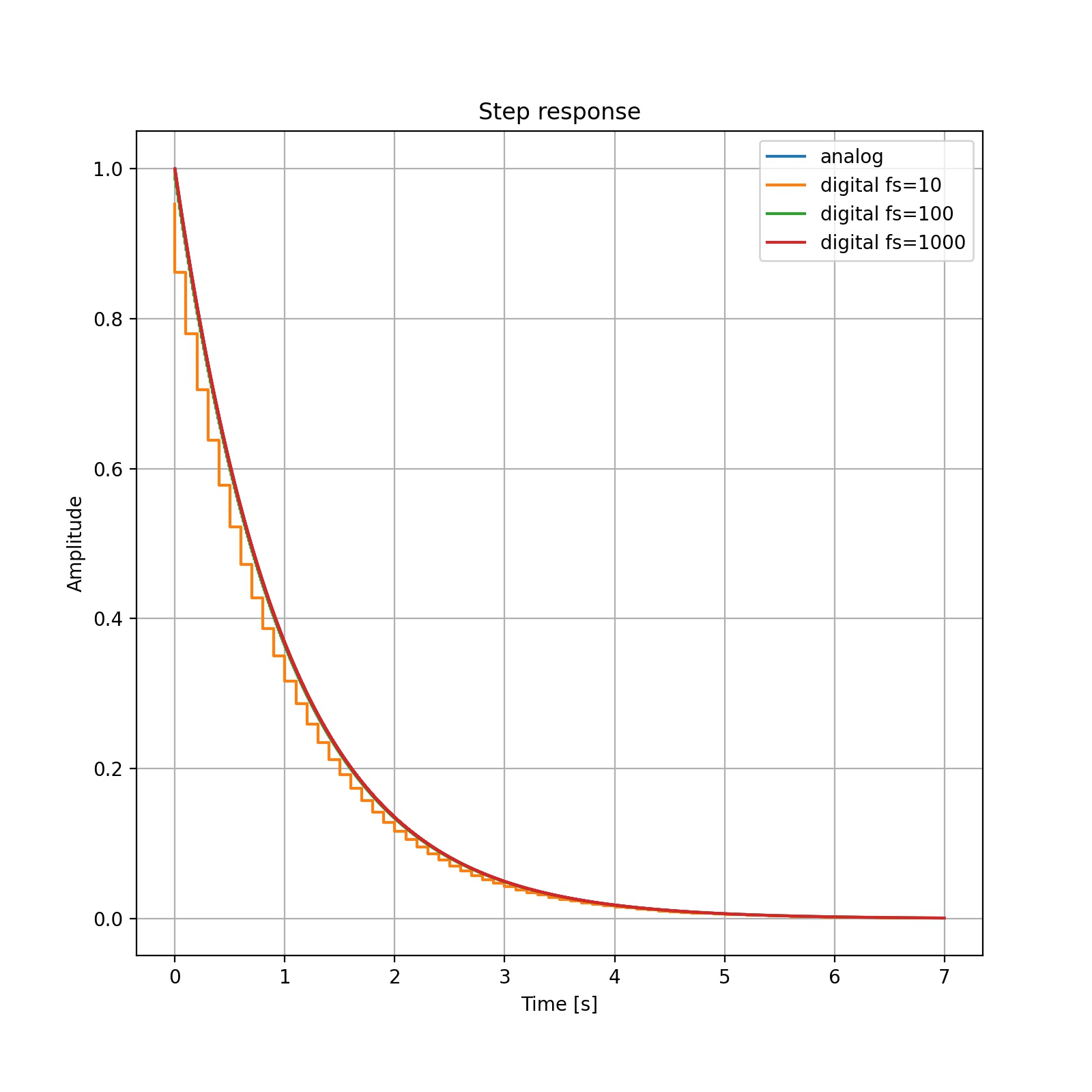 Kesimpulan:
Kesimpulan:
- perubahan frekuensi sampling tidak banyak mengubah bentuk sinyal, kecual pada fs = 10 Hz