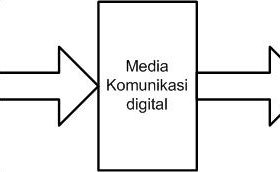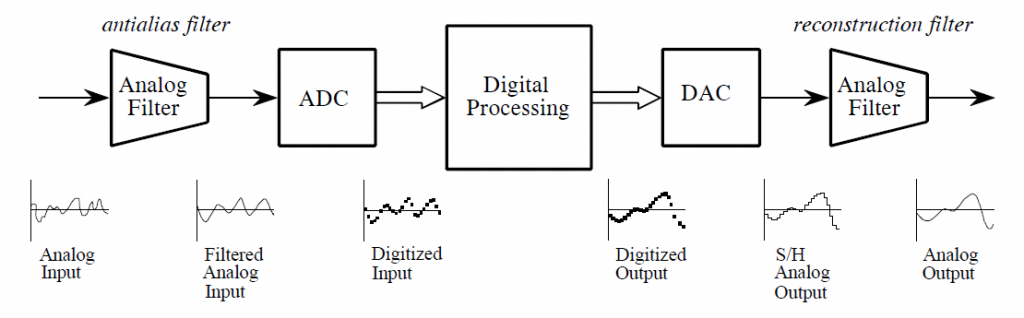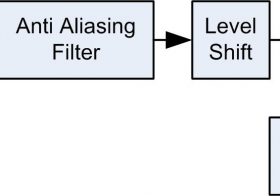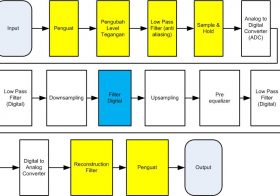
Suatu sistem filter digital secara prinsip sederhana mengubah sinyal analog menjadi digital, kemudian mengolah sinyal digital tersebut dengan algoritma tertentu, kemudian mengubah sinyal digital kembali menjadi sinyal analog. Secara diagram blok dapat digambarkan sebagai berikut:

Filter digital dapat diimplementasikan dengan beberapa cara, di antaranya dengan sistem mikroprosesor dan sistem digital seperti FPGA (Filed Programmable Gate Array).
Dalam prakteknya, sistem tersebut perlu beberapa tambahan subsistem/modul supaya dapat diimplementasikan secara nyata.
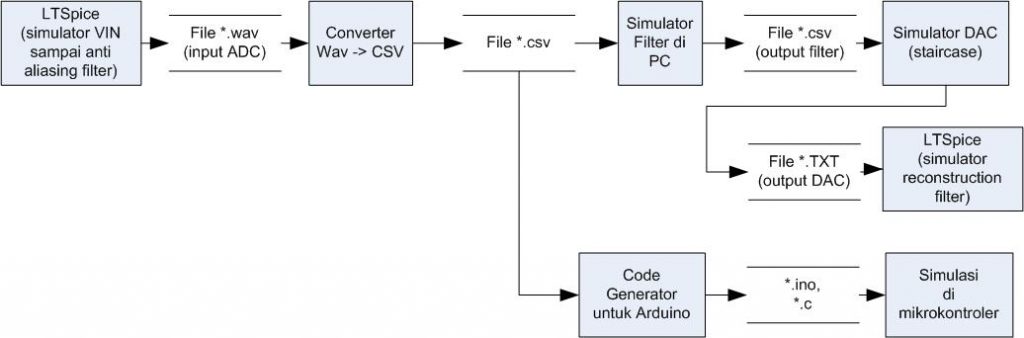
Berikut ini sistem lengkap filter digital untuk diimplementasikan dengan sistem mikroprosesor:
Penjelasan Sistem Filter Digital Sederhana
- Input: sinyal input berasal dari input, misal untuk sistem audio dapat berupa mikrofon, atau MP3 player, atau komputer.
- Sinyal input ini memiliki level tegangan dan impedansi tertentu. Seringkali sinyal ini perlu diperkuat dulu. Misal mikrofon biasanya memiliki kuat sinyal puluhan sampai ratusan milivolt dengan impedansi ratusan ohm.
- Penguat: Penguat memiliki fungsi buffering dan juga menyesuaikan amplitudo supaya cocok dengan amplitudo dari ADC yang dipakai.
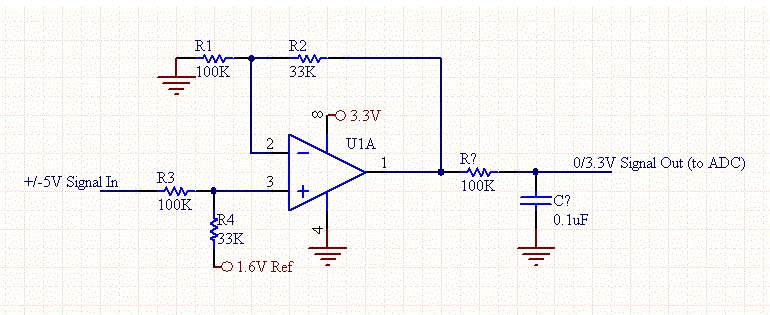
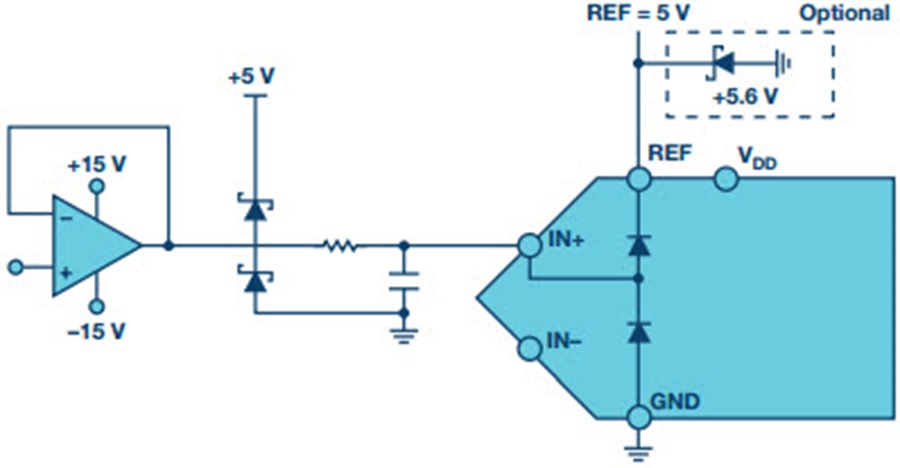
- Pengubah Level Tegangan: tegangan input berupa tegangan bolak-balik, bisa saja memiliki tegangan positif dan negatif. ADC yang dipakai seringkali hanya dapat menerima tegangan positif, sehingga tegangan input mesti digeser agar menjadi positif.
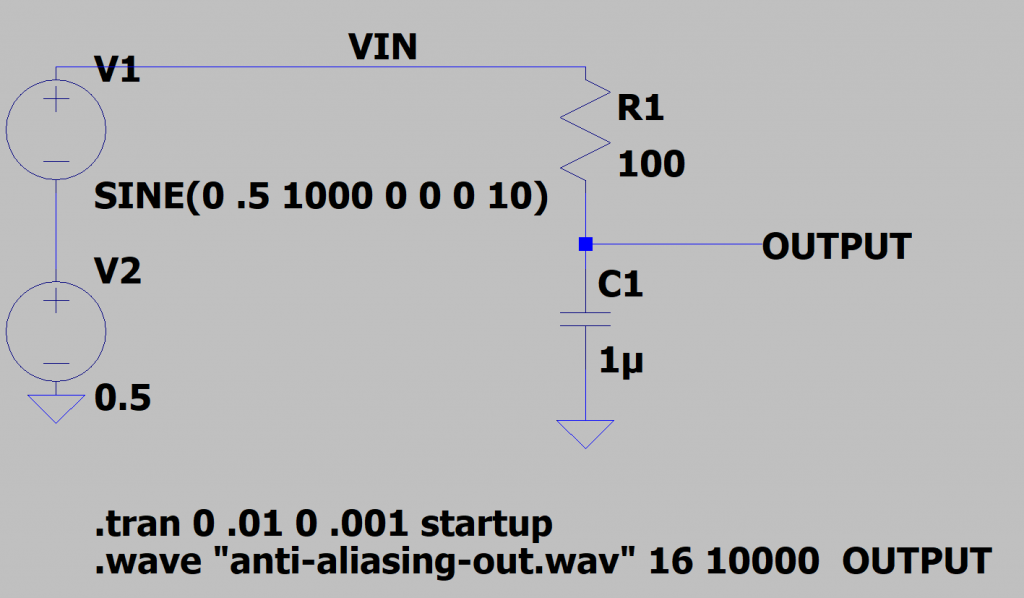
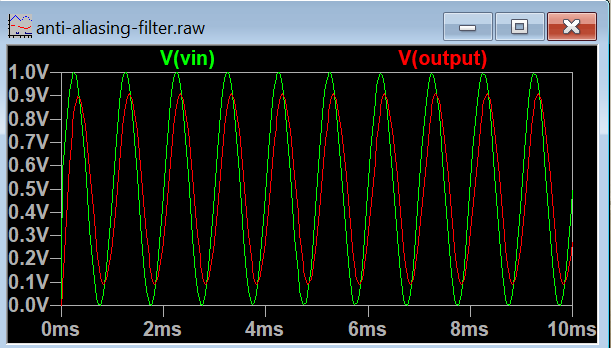
- Low Pass Filter (anti aliasing): sesuai teori sinyal, frekuensi sampling setidaknya memiliki frekuensi 2x frekuensi kerja sinyal yang diukur. Sinyal input yang lebih dari 1/2 frekuensi sampling harus ditapis supaya tidak terjadi aliasing.
- ADC (Analog to Digital Converter): mengubah tegangan analog menjadi suatu angka digital, dengan resolusi bit tertentu, dan kecepatan sampling tertentu.
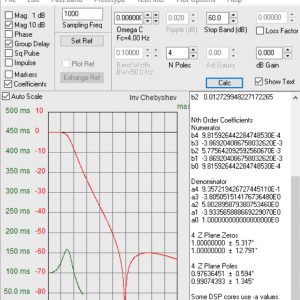
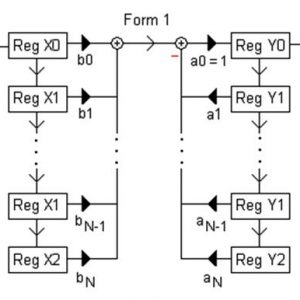
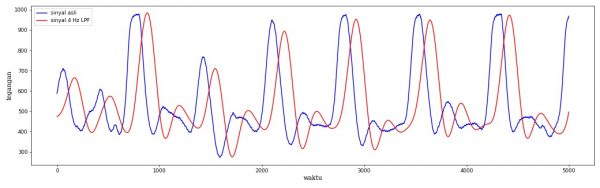
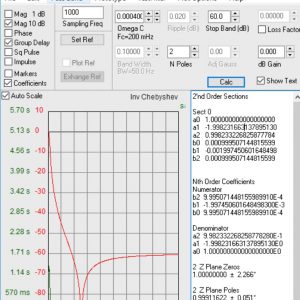
- Filter Digital: melakukan proses pengolahan sinyal yang diinginkan, dapat berupa LPF (low pass filter) , HPF (high pass filter), BPF (band pass filter), BSF (band stop filter) ataupun Equalizer.
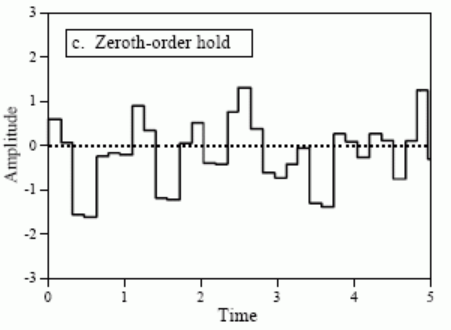
- Digital to Analog Converter: mengubah sinyal digital menjadi sinyal analog. Umumnya menggunakan prinsip ZoH (Zero order Hold).
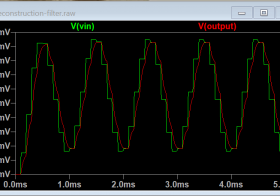
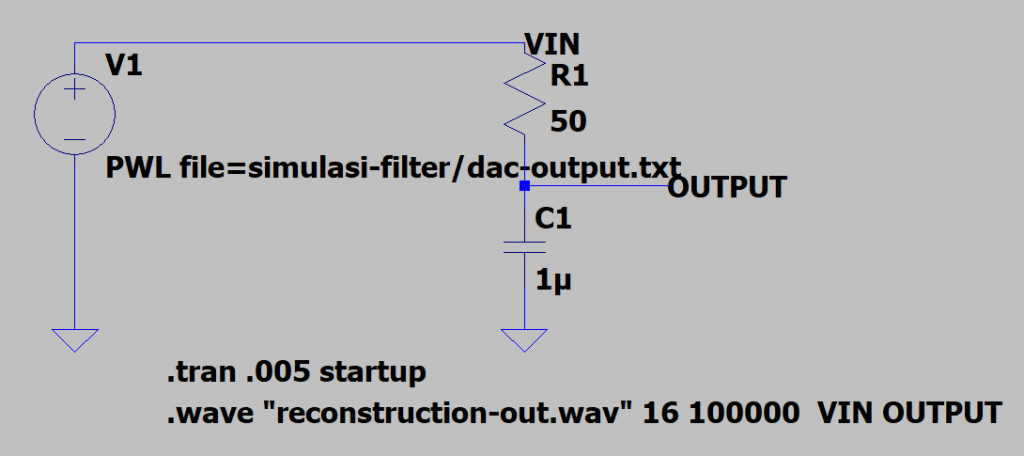
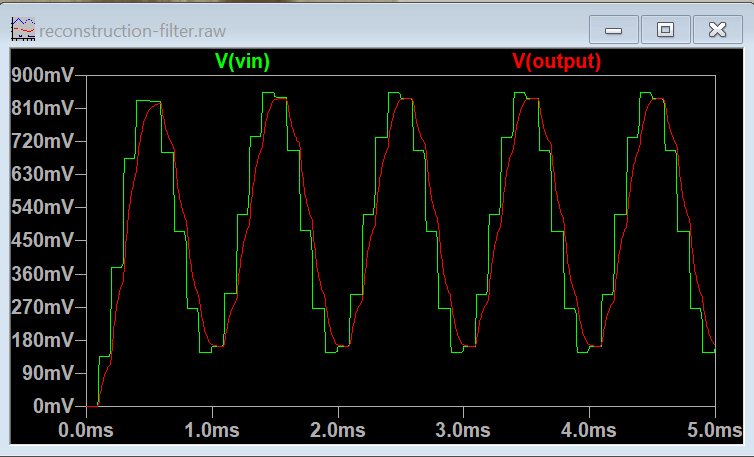
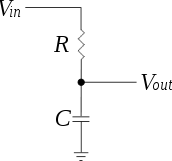
- Reconstruction Filter: sinyal dari Zero order Hold memiliki bentuk seperti anak tangga (staircase), sehingga memiliki komponen frekuensi tinggi. Untuk itu perlu ada filter rekonstruksi yang menghilangkan komponen frekuensi tinggi tersebut. Selain itu ZoH juga mengubah respon frekuensi, yaitu memberi redaman di frekuensi tinggi. Idealnya reconstruction filter juga mengkompensasi hal tersebut.
- Penguat: untuk menyesuaikan level tegangan dan impedansi dari DAC ke tahap selanjutnya
- Power supply: implisit semua sistem elektronika perlu power supply. Sistem pengolah digital ada bagian analog dan digital, sehingga masing-masing perlu level tegangan dan power supply tersendiri.
Kelemahan Sistem Filter Digital Sederhana
Sistem di atas sudah dapat berfungsi dengan baik, namun memiliki beberapa kelemahan.
Masalah pertama: konversi analog ke digital
- filter anti aliasing sulit untuk dibuat ‘tajam’, sehingga frekuensi sampling mesti jauh lebih tinggi daripada frekuensi kerja sinyal. Jika frekuensi sampling terlalu dekat, respon frekuensi kerja terpengaruh oleh anti aliasing filter, atau juga sebagian sinyal frekuensi tinggi dapat menembus filter anti aliasing.
- akibat frekuensi sampling tinggi, maka bagian filter digital mesti bekerja pada frekuensi lebih tinggi daripada frekuensi kerja sinyal.
- hal ini juga berpengaruh jika sinyal perlu disimpan: storage akan membesar
- hal ini juga berpengaruh jika sinyal perlu dikirim: keperluan bandwidth komunikasi membesar.
- solusi: sampling dilakukan dengan frekuensi tinggi, namun frekuensi sampling diturunkan (downsampling) sebelum sinyal diolah/dikirim/disimpan.
- pada proses downsampling, sinyal perlu difilter secara digital supaya tidak terjadi aliasing. proses filter digital lebih mudah dibandingkan filter analog, terutama karena masalah ketelitian nilai komponen analog.
Masalah kedua: konversi digital ke analog
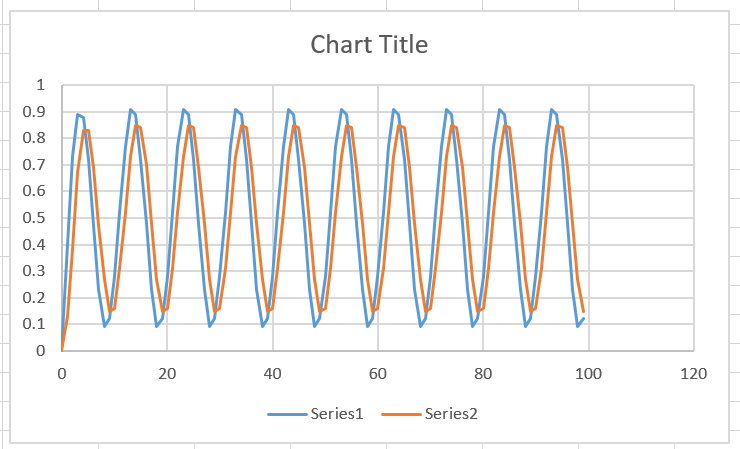
Zero order Hold pada DAC mempunyai respon frekuensi sinc(), sehingga ada redaman di frekuensi tinggi
- solusi 1: sinyal digital diubah ke frekuensi tinggi sebelum masuk ke DAC, dengan demikian pengaruh redaman frekuensi tinggi berkurang.
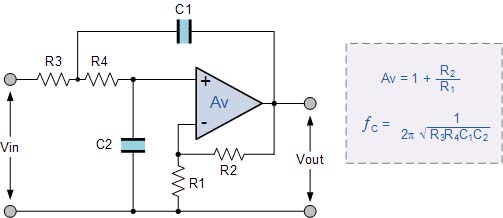
- solusi 2: sinyal digital diperkuat dulu di frekuensi tinggi dengan equalizer, supaya dapat mengkompensasi redaman di frekuensi tinggi.
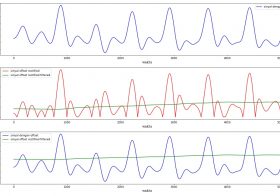
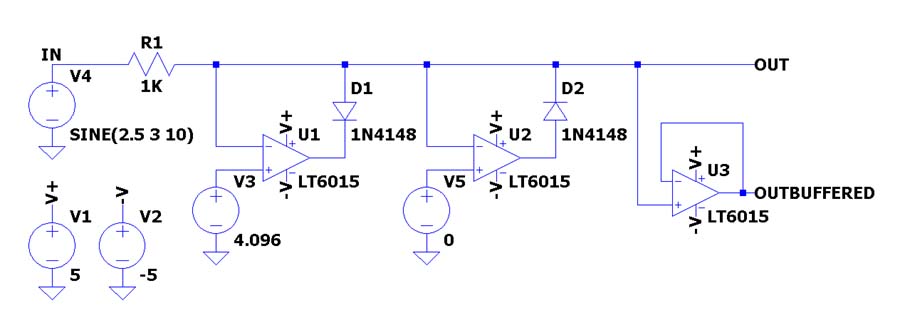
Berikut ini proses ekualisasi sinyal untuk kompensasi pengaruh ZoH.
Pada solusi (a) proses ekualisasi dilakukan secara digital sebelum DAC , disebut sebagai tahap pre-equalization.
Pada solusi (b) proses ekualisasi dilakukan secara analog setelah LPF, disebut sebagai tahap post-equalization.
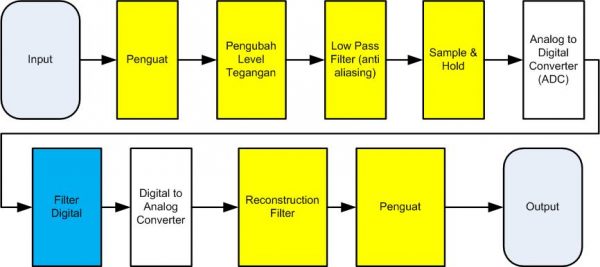
Sistem Lengkap
Berikut ini blok diagram sistem filter digital dengan tambahan solusi-solusi supaya mengurangi permasalahan-permasalahan.
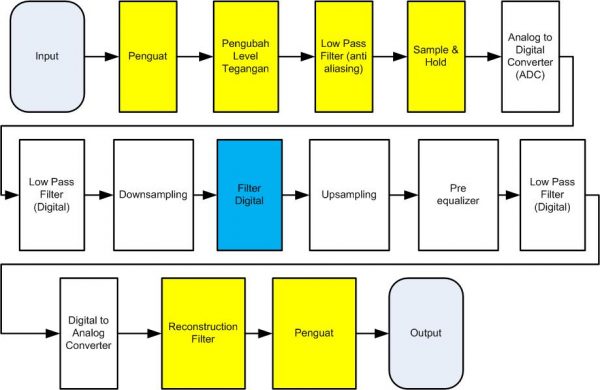
Pada sistem ini dipilih pre-ekualisasi secara digital , dengan pertimbangan merancang equalizer secara digital lebih mudah. Proses pembuatan equalizer ini dapat dilakukan dengan metode ‘Design of FIR Filters Using the Frequency Sampling Method’.
Referensi
- Simulasi Pengolahan Sinyal Digital
- Lizhe Tan, Jean Jiang, Digital Signal Processing (Third Edition) Fundamentals and Applications, Elsevier, 2019
- Steven W. Smith, , The Scientist and Engineer’s Guide to Digital Signal Processing http://www.dspguide.com/
- Equalizing Techniques Flatten DAC Frequency Response https://www.maximintegrated.com/en/design/technical-documents/app-notes/3/3853.html
- Flatten DAC frequency response, Electronic Design Network https://www.edn.com/flatten-dac-frequency-response/
- Designing an anti-aliasing filter for ADCs in the frequency domain http://www.ti.com/lit/an/slyt626/slyt626.pdf