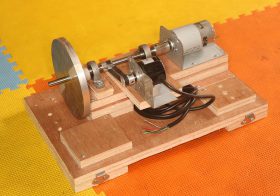
Berikut ini foto-foto prototipe kit untuk percobaan pengendalian posisi/kecepatan motor dengan menggunakan kendali digital berbasis sistem mikroprosesor.
Komponen utama adalah sebagai berikut
- Motor DC 12 volt tipe 775
- Poros utama 8 mm
- Pillow bearing 8mm
- Rotary Encoder 400 pulse , poros 6 mm
- Dua buah Pelat Aluminium 5mm sebagai momen inersia
- closed loop timing belt dengan panjang 160 mm
- Pulley GT2 dengan poros 8 mm (untuk dipasang di poros utama)
- Pulley GT2 dengan poros 6 mm (untuk rotary encoder)
-
- Kit Kendali Motor Digital dalam keadaan terbuka
Penutup diperlukan agar melindungi kit praktikum dan memudahkan penyimpanan.

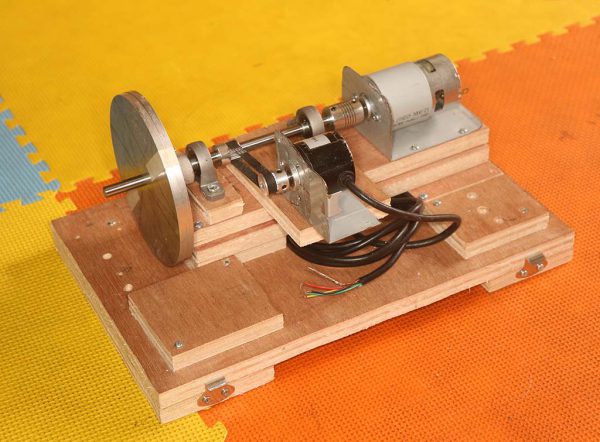
Berikut ini komponen utama yaitu motor 12 volt tipe “775”, atau lengkapnya GRS-775-PH-3865DF-12,0VDC GT2017 C.

Sebagai momen inersia menggunakan 2 buah pelat aluminium dengan tebal 5mm dengan diameter 12 cm.
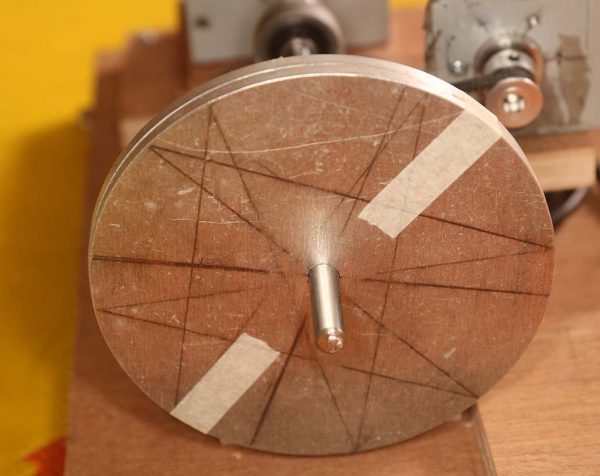
Tepat di balik pelat aluminium dipasang sebuah pillow bearing sebagai dudukan poros.

Rotary encoder 400 pulsa sebagai sensor posisi dan kecepatan motor. Outputnya berupa sinyal digital yang dibaca oleh sistem mikroprosesor

Poros utama dihubungkan ke rotary encoder dengan closed loop timing belt dengan panjang 160 mm. Terdapat pulley di masing-masing poros.

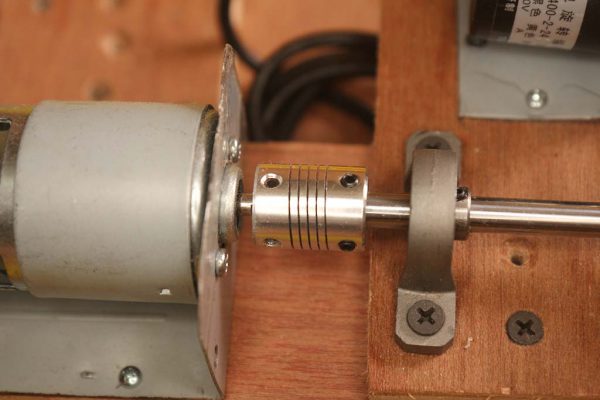
Motor dihubungkan ke poros utama dengan flexible coupling. Nampak juga dudukan poros menggunakan pillow bearing.
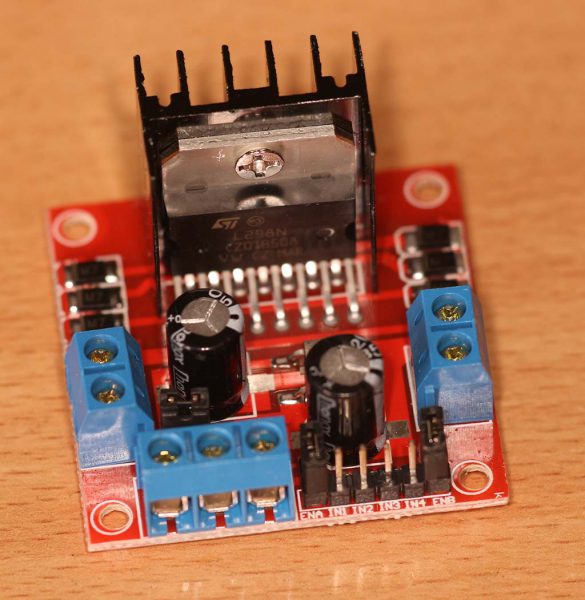
Output dari sistem mikroprosesor (Arduino, ARM dan sebagainya) tidak cukup kuat untuk menggerakkan motor. Untuk itu perlu diperkuat dulu dengan motor driver.
Contoh pertama adalah motor driver yang populer: L298N yang menggunakan komponen aktif dengan teknolgi BJT (Bipolar Junction Transistor).


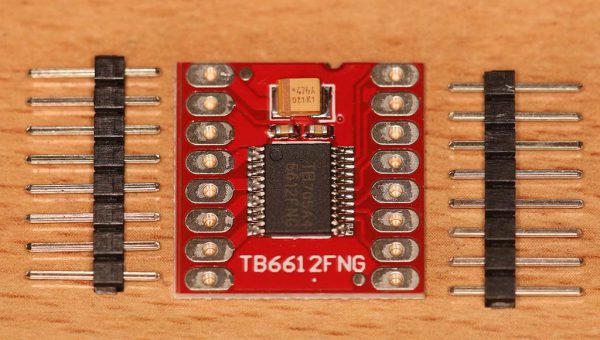
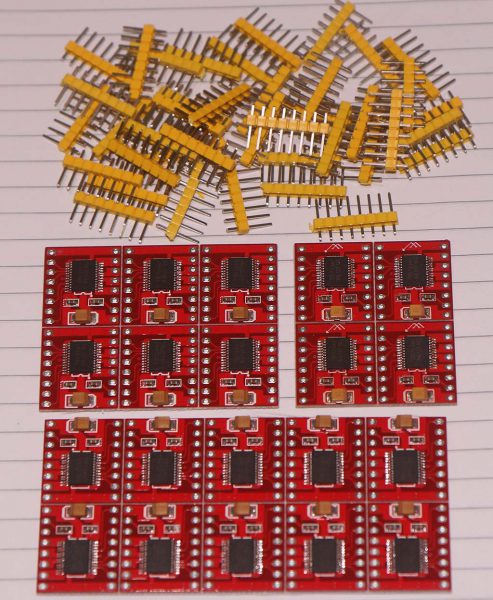
Sebagai alternatif motor driver adalah IC TB6612FNG yang menggunakan teknologi MOSFET


One thought on “Kit Percobaan Kendali Motor Digital”