Berikut ini hasil pengukuran output analog dari DAC dengan osiloskop
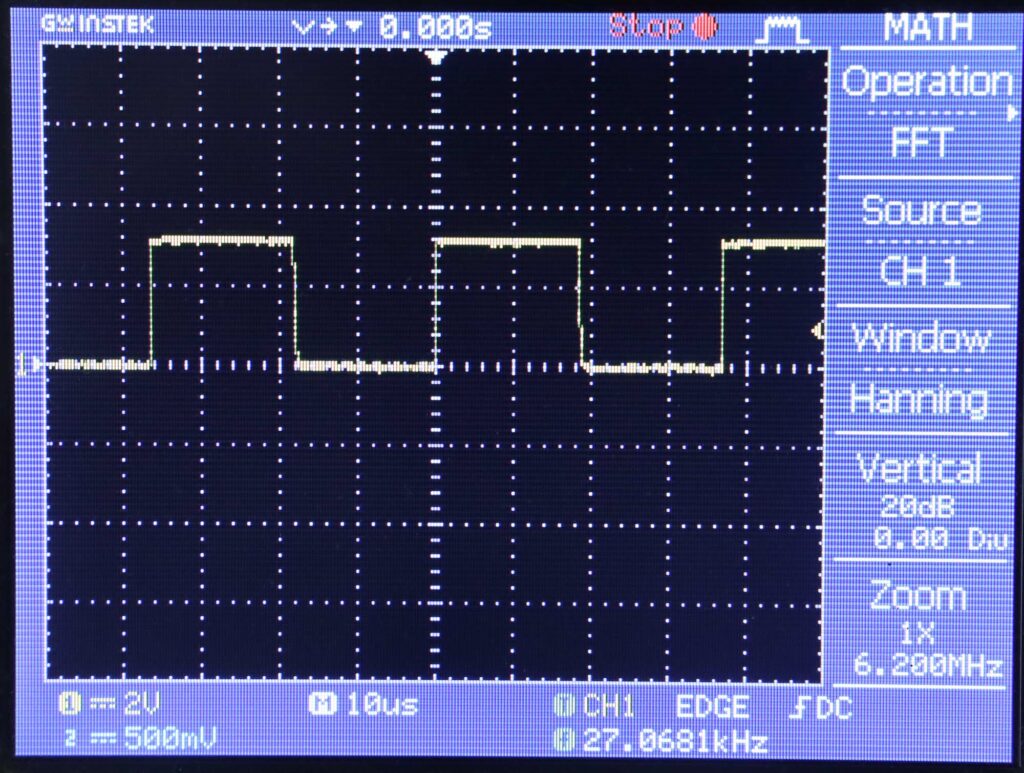
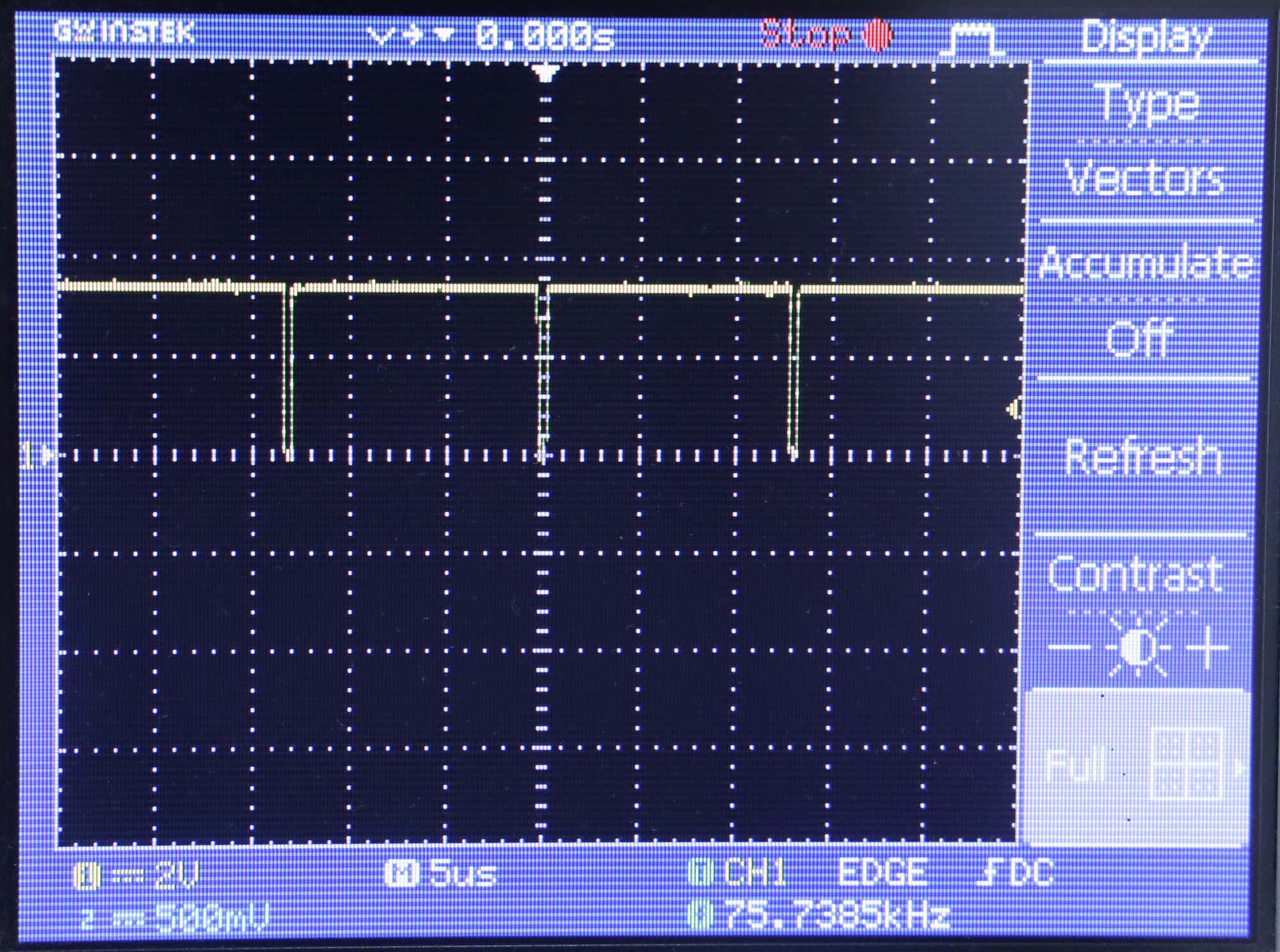
Pengukuran V2
Pada pengukuran ini menggunakan fungsi dac_output_enable() dan dac_output_voltage(). Pada fungsi dacWrite, fungsi dac_output_enable() selalu dipanggil sehingga cukup menghabiskan waktu.
// Profiling kecepatan konversi ADC MCP3008 di ESP32
// menggunakan modified header dari https://github.com/bakercp/MCP3XXX
#include "MCP3XXXZ.h" // custom header
MCP3008 adc;
void setup() {
Serial.begin(115200);
Serial.println("start");
// Use the default SPI hardware interface.
adc.begin();
// Or use custom pins to use a software SPI interface.
// adc.begin(SS, MOSI, MISO, SCK);
pinMode(22, OUTPUT); // digital output for monitoring
pinMode(21, OUTPUT);
adc.spistart(); //
}
int counter = 0, last_time = 0, current_time = 0;
float durasi=0;
int jumlah_iterasi=100000;
void loop() {
for (;;) {
digitalWrite(22, HIGH); // turn the LED on (HIGH is the voltage level)
adc.analogRead(0);
digitalWrite(22, LOW); // turn the LED on (HIGH is the voltage level)
counter = counter + 1;
if (counter == jumlah_iterasi) { // tiap 10000x berhenti
counter = 0;
current_time = millis();
durasi = (float)(current_time - last_time) / (float) jumlah_iterasi;
Serial.print("durasi (ms) ");
Serial.println(durasi,4);
last_time = current_time;
}
}
}
Kode header sebagai berikut
//
// Copyright (c) 2018 Christopher Baker <https://christopherbaker.net>
//
// SPDX-License-Identifier: MIT
//
#pragma once
#include <Arduino.h>
#include <SPI.h>
/// \brief A template class supporting MCP3XXX ADC SPI chips.
///
/// \tparam NumBits Number of ADC bits.
/// \tparam NumChannels Number of input channels.
/// \tparam MaxSPIClockSpeed Maximum SPI communication speed rate in Hz.
/// \tparam SPITransferLength The number of bytes transferred over SPI.
template<uint8_t NumBits,
uint8_t NumChannels,
uint32_t MaxSPIClockSpeed,
uint8_t SPITransferLength = 3>
class MCP3XXX_
{
public:
enum
{
/// \brief ADC error value.
ADC_ERROR_INVALID_CHANNEL = -1,
/// \brief ADC error value.
ADC_UNSUPPORTED_CONFIGURATION = -2,
/// \brief Number of ADC bits.
NUM_BITS = NumBits,
/// \brief A bit mask based on the number of bits.
BIT_MASK = (1 << NUM_BITS) - 1,
/// \brief Number of input channels.
NUM_CHANNELS = NumChannels,
/// \brief Maximum SPI communication speed rate in Hz.
MAX_SPI_CLOCK_SPEED = MaxSPIClockSpeed,
/// \brief The number of bytes transferred over SPI.
SPI_TRANSFER_LEGNTH = SPITransferLength
};
/// \brief Construct a default MCP3XXX_ device.
MCP3XXX_()
{
}
/// \brief Destroy the MCP3XXX_ device.
~MCP3XXX_()
{
}
void spistart(){
SPI.beginTransaction(SPISettings(MAX_SPI_CLOCK_SPEED, MSBFIRST, SPI_MODE0));
}
/// \brief Set up the ADC using default hardware SPI pins.
///
/// Hardware SPI pins vary based on the board being used. These default pins
/// are represented by the constants SS, MOSI, MISO and SCK.
///
/// \sa https://www.arduino.cc/en/Reference/SPI
/// \param csPin Chip Select Pin. Default value is SS.
void begin(uint8_t csPin = SS)
{
_useHardwareSPI = true;
_csPin = csPin;
_mosiPin = MOSI;
_misoPin = MISO;
_sckPin = SCK;
// Set up pin modes.
pinMode(_csPin, OUTPUT);
// Begin software SPI.
// Initializes the SPI bus by setting SCK, MOSI, and SS to outputs,
// pulling SCK and MOSI low, and SS high.
digitalWrite(_csPin, HIGH); // Redundant.
SPI.begin();
}
/// \brief Set up the ADC using custom software SPI pins.
///
/// This method forces the SPI to be accesed via software methods rather
/// than hardware SPI. This is true, even if the default hardware SPI pins
/// are used.
///
/// \param csPin Chip Select Pin.
/// \param mosiPin MOSI pin.
/// \param misoPin MISO pin.
/// \param sckPin Clock pin.
void begin(uint8_t csPin, uint8_t mosiPin, uint8_t misoPin, uint8_t sckPin)
{
_useHardwareSPI = false;
_csPin = csPin;
_mosiPin = mosiPin;
_misoPin = misoPin;
_sckPin = sckPin;
// Set up pin modes manually.
pinMode(_csPin, OUTPUT);
pinMode(_mosiPin, OUTPUT);
pinMode(_misoPin, INPUT);
pinMode(_sckPin, OUTPUT);
// Begin software SPI. We initiate CS Pin HIGH to prepare it to go LOW
// on our first read.
digitalWrite(_csPin, HIGH);
}
/// \brief Read the analog value.
///
/// Reads a single-ended analog value using the given channel.
///
/// \param channel The channel (channel < NUM_CHANNELS) to read.
/// \returns values [0, MAX_VALUE) on success or an error code on failure.
uint32_t analogRead(uint8_t channel) const
{
if (channel < NUM_CHANNELS)
return _read(channel, false);
return ADC_ERROR_INVALID_CHANNEL;
}
/// \brief Read a differential analog value by specifying the IN+ channel.
///
/// Consecutive channel pairs can be differentially read. For instance, if
/// inPositiveChannel == 0, inNegativeChannel will be 1.
/// If inPositiveChannel == 1, then inNegativeChannel will be 0. Thus if
/// inPositiveChannel is odd, inNegativeChannel == (inPositiveChannel - 1).
/// if inPositiveChannel is even, inNegativeChannel == (inPositiveChannel + 1).
///
/// \param inPositiveChannel The channel that should be input positive.
/// \returns Differential values. See the data sheet for information on how
/// to interpret these return values.
uint32_t analogReadDifferential(uint8_t inPositiveChannel) const
{
if (inPositiveChannel < NUM_CHANNELS)
return _read(inPositiveChannel, true);
return ADC_ERROR_INVALID_CHANNEL;
}
/// \returns the number of ADC channels.
size_t numChannels() const
{
return NUM_CHANNELS;
}
/// \returns the number of ADC bits.
size_t numBits() const
{
return NUM_BITS;
}
private:
MCP3XXX_(const MCP3XXX_&);
MCP3XXX_& operator = (const MCP3XXX_&);
/// \brief Read the value from the given channel using the given mode.
/// \param channel The channel to read.
/// \param differential If true, use differential read mode.
uint32_t _read(uint8_t channel, bool differential) const
{
// Data transfers are done using "8-bit segments" approach in data sheet.
// The sent data alignment resuls in correctly aligned return bytes after
// the SPI transfer.
uint8_t data[SPI_TRANSFER_LEGNTH];
// Check for MCP3004
if (NUM_CHANNELS == 2)
{
if (NUM_BITS == 10)
{
// Start bit.
data[0] = 0b01000000;
// Differential bit.
data[0] |= (differential ? 0b00000000 : 0b00100000);
// Channel bit.
data[0] |= (channel == 0 ? 0b00000000 : 0b00010000);
// MSBF bit is set to 1. See section 5.1 of the data sheet.
data[0] |= 0b00001000;
// It doesn't matter what data[1] is set to.
}
else
{
return ADC_UNSUPPORTED_CONFIGURATION;
}
}
else
{
if (NUM_BITS == 10)
{
// The start bit. We position it here to align our output data.
data[0] = 0b00000001;
// Set the differential / single bit and the channel bits.
data[1] = (differential ? 0b00000000 : 0b10000000) | (channel << 4);
// It doesn't matter what data[2] is set to.
}
else
{
return ADC_UNSUPPORTED_CONFIGURATION;
}
}
if (_useHardwareSPI)
{
// Here we replace the sent data with the received data.
// SPI.beginTransaction(SPISettings(MAX_SPI_CLOCK_SPEED, MSBFIRST, SPI_MODE0));
// digitalWrite(21, HIGH); // turn the LED on (HIGH is the voltage level)
digitalWrite(_csPin, LOW);
for (size_t i = 0; i < SPI_TRANSFER_LEGNTH; ++i)
{
data[i] = SPI.transfer(data[i]);
}
digitalWrite(_csPin, HIGH);
// digitalWrite(21, LOW); // turn the LED on (HIGH is the voltage level)
// SPI.endTransaction();
}
else
{
// Slower, but can use any pin.
// We could save a few operations by skipping some digitalWrites(),
// using bitwise operators and doing direct port-manipulation.
// But this is used because it is "easier" to read.
digitalWrite(_csPin, LOW);
for (size_t i = 0; i < SPI_TRANSFER_LEGNTH; ++i)
{
for (size_t j = 8; j-- > 0;)
{
// Set MOSI data.
digitalWrite(_mosiPin, bitRead(data[i], j));
// Set Clock HIGH.
digitalWrite(_sckPin, HIGH);
// Read MISO data.
bitWrite(data[i], j, digitalRead(_misoPin));
// Set Clock LOW.
digitalWrite(_sckPin, LOW);
}
}
digitalWrite(_csPin, HIGH);
}
// Here we take the second two bytes returned as our value.
// This value is already correctly aligned since we are using the 8-bit
// segments approach. The BIT_MASK is calculated based on the number out
// bits specified in the template parameters.
return ((data[SPI_TRANSFER_LEGNTH - 2] << 8) | data[SPI_TRANSFER_LEGNTH - 1]) & BIT_MASK;
}
/// \brief Use hardware SPI to communicate.
bool _useHardwareSPI = true;
/// \brief Chip Select pin.
uint8_t _csPin = SS;
/// \brief MOSI pin.
uint8_t _mosiPin = MOSI;
/// \brief MISO pin.
uint8_t _misoPin = MISO;
/// \brief SCLK pin.
uint8_t _sckPin = SCK;
};
/// \brief A typedef for the MCP3002.
/// Max clock frequency for 2.7V: 1200000 Hz
/// Max clock frequency for 5.0V: 3200000 Hz
/// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21294E.pdf
typedef MCP3XXX_<10, 2, 1200000, 2> MCP3002;
/// \brief A typedef for the MCP3004.
/// Max clock frequency for 2.7V: 1350000 Hz
/// Max clock frequency for 5.0V: 3600000 Hz
/// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21295C.pdf
typedef MCP3XXX_<10, 4, 1350000> MCP3004;
/// \brief A typedef for the MCP3008.
/// Max clock frequency for 2.7V: 1350000 Hz
/// Max clock frequency for 5.0V: 3600000 Hz
/// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21295C.pdf
//typedef MCP3XXX_<10, 8, 1350000> MCP3008;
typedef MCP3XXX_<10, 8, 3000000> MCP3008;
// /// \brief A typedef for the MCP3202.
// /// Max clock frequency for 2.7V: 900000 Hz
// /// Max clock frequency for 5.0V: 1800000 Hz
// /// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21034D.pdf
// typedef MCP3XXX_<12, 2, 900000> MCP3202;
//
// /// \brief A typedef for the MCP3204.
// /// Max clock frequency for 2.7V: 1000000 Hz
// /// Max clock frequency for 5.0V: 2000000 Hz
// /// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21298c.pdf
// typedef MCP3XXX_<12, 4, 1000000> MCP3204;
//
// /// \brief A typedef for the MCP3208.
// /// Max clock frequency for 2.7V: 1000000 Hz
// /// Max clock frequency for 5.0V: 2000000 Hz
// /// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21298c.pdf
// typedef MCP3XXX_<12, 8, 1000000> MCP3208;
//
// /// \brief A typedef for the MCP3208.
// /// Max clock frequency for 2.7V: 1050000 Hz
// /// Max clock frequency for 5.0V: 2100000 Hz
// /// \sa http://ww1.microchip.com/downloads/en/DeviceDoc/21697e.pdf
// typedef MCP3XXX_<13, 8, 1050000> MCP3304;
Pengukuran Frekuensi ADC internal pada Arduino Nano ATmega328
berikut ini kode yang dipakai untuk pengukuran
int counter; // how many iterations
int time_begin = 0;
int time_end = 0;
int duration;
int sensorPin = A0; // select the input pin for the potentiometer
int ledPin = 13; // select the pin for the LED
void setup() {
Serial.begin(115200);
counter = 0;
pinMode(2, OUTPUT);
Serial.println("start benchmark");
}
//---------------------------------------------------
void loop() {
int value; // angka yang ditulis
value = 0; // minimum value
analogRead(sensorPin);
PORTD=0; // langsung akses port supaya lebih cepat
analogRead(sensorPin);
PORTD=255;
counter = counter + 1;
if (counter >= 10000) {
float period;
int time_now = millis();
counter = 0;
duration = time_now - time_begin;
period = duration / 10000.0 /2;
Serial.print("period (ms): ");
Serial.println(period);
// prepare next round
time_begin = time_now;
}
}
Hasil Pengukuran
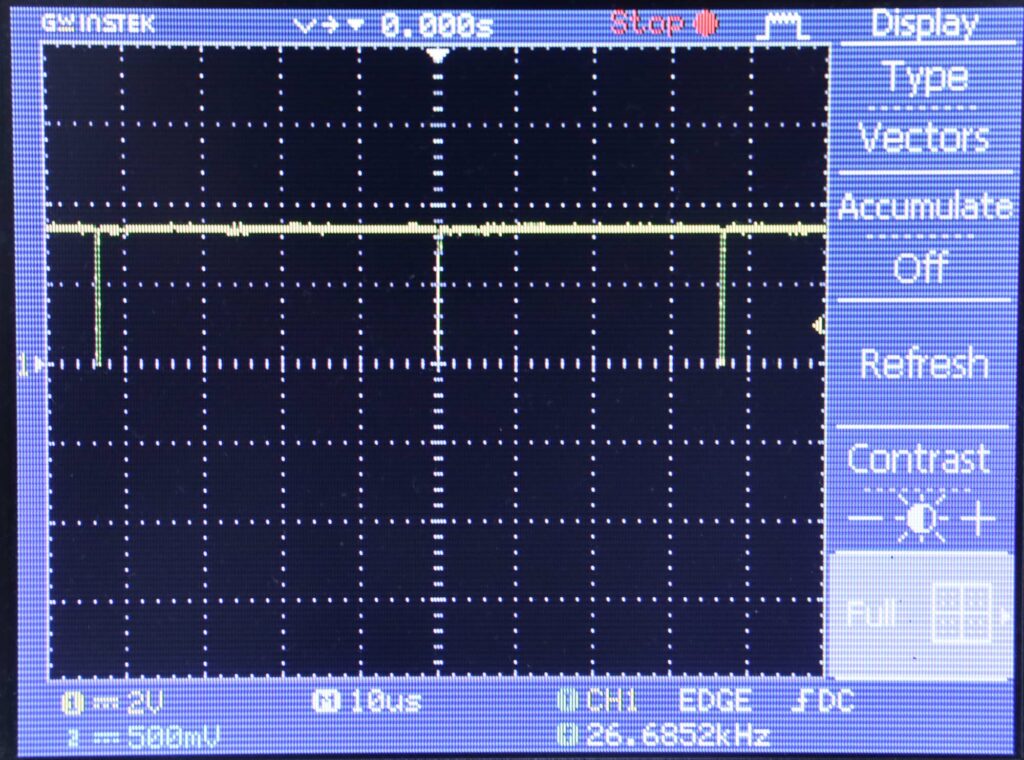
Pengukuran output pada pin D2 dengan osiloskop menghasilkan sinyal berikut
Dari data port serial, didapatkan angka perioda 0,11 ms
start benchmark
period (ms): 0.11
period (ms): 0.11
period (ms): 0.11
period (ms): 0.11
period (ms): 0.11
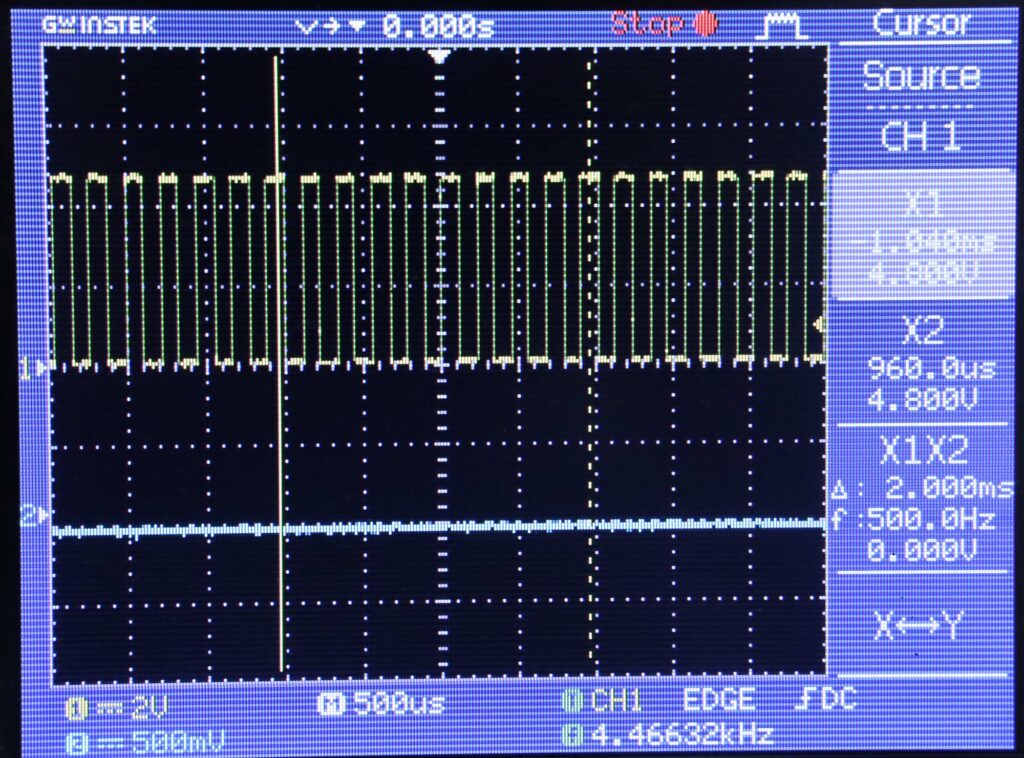
Dengan osiloskop didapatkan sinyal kotak dengan frekuensi 4,45532 kHz . Artinya frekuensi ADC adalah dua kalinya, yaitu 8,91064 kHz
Angka 8900 Hz ini sesuai dengan pengukuran di artikel lain: https://chisight.wordpress.com/2016/03/25/speeding-up-the-adc-on-an-arduino-atmega-328p/
Kesimpulan
Frekuensi ADC adalah 8,91064 kHz
Frekuensi ini jauh di bawah kecepatan teoritis. Kemungkinan kelambatan karena library yang dipakai.
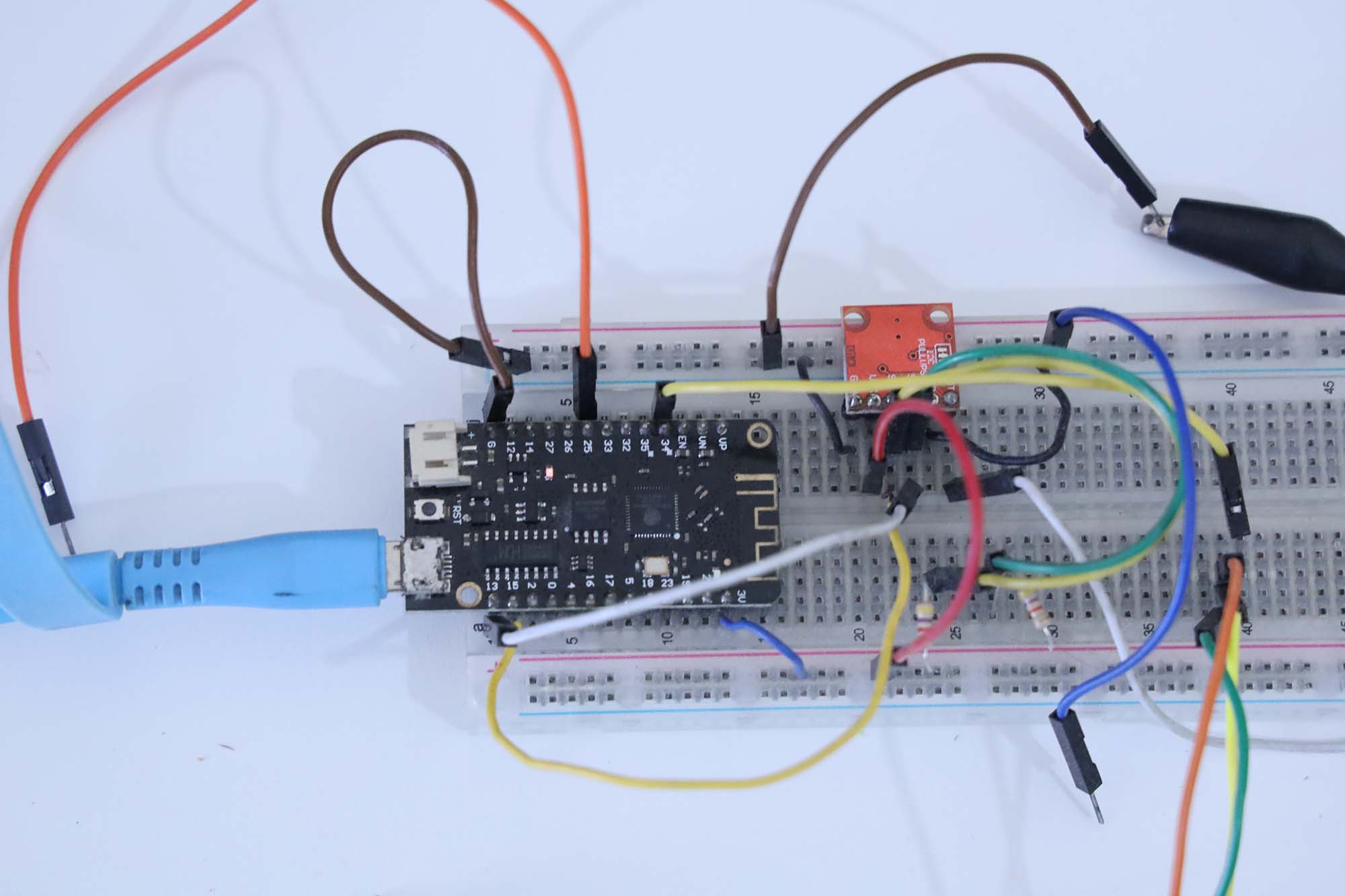
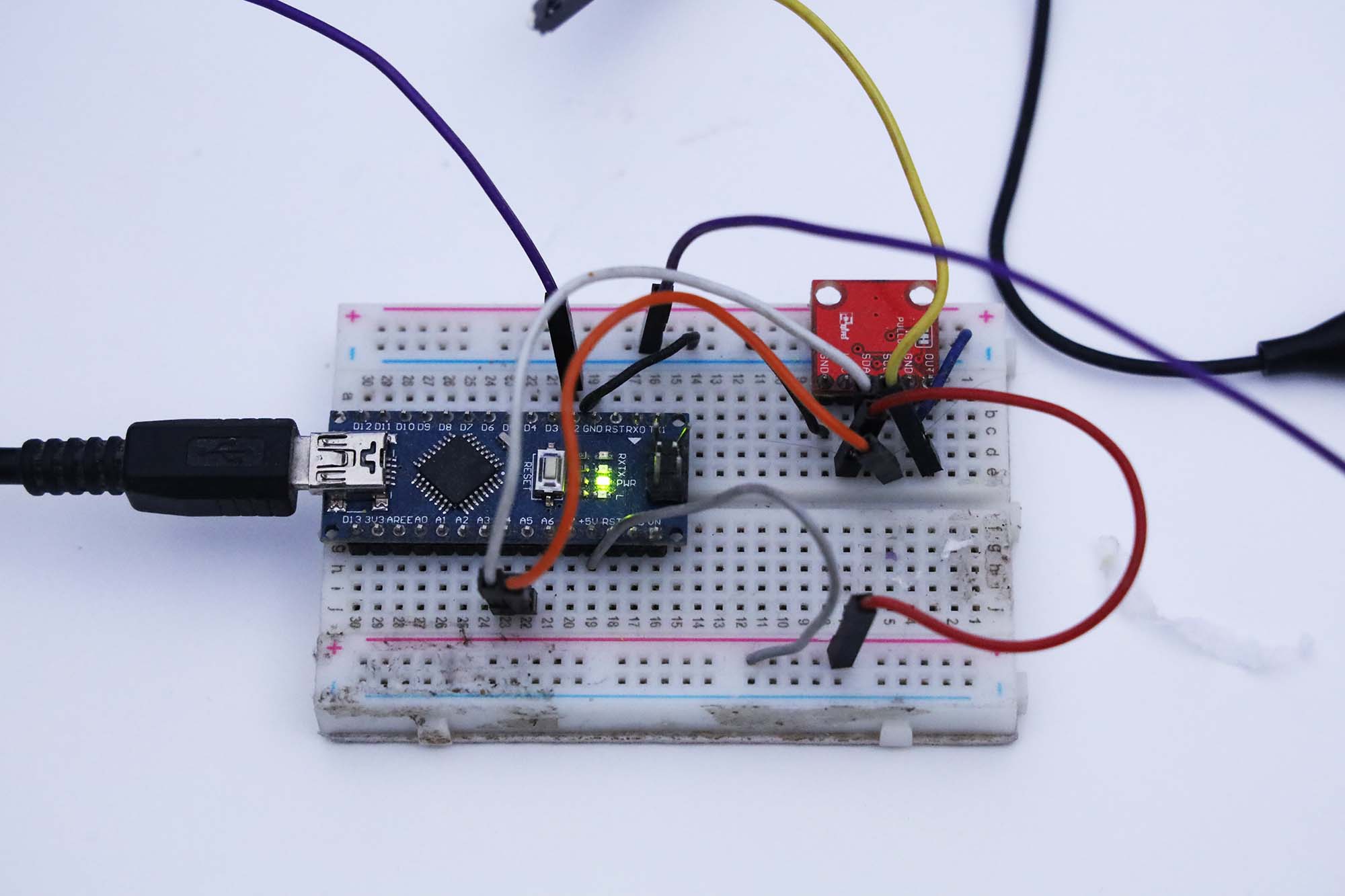
Pada percobaan ini diukur frekuensi & perioda konversi DAC (Digital to Analog Converter) tipe MCP4725 pada modul Arduino Nano dengan prosesor ATmega328.
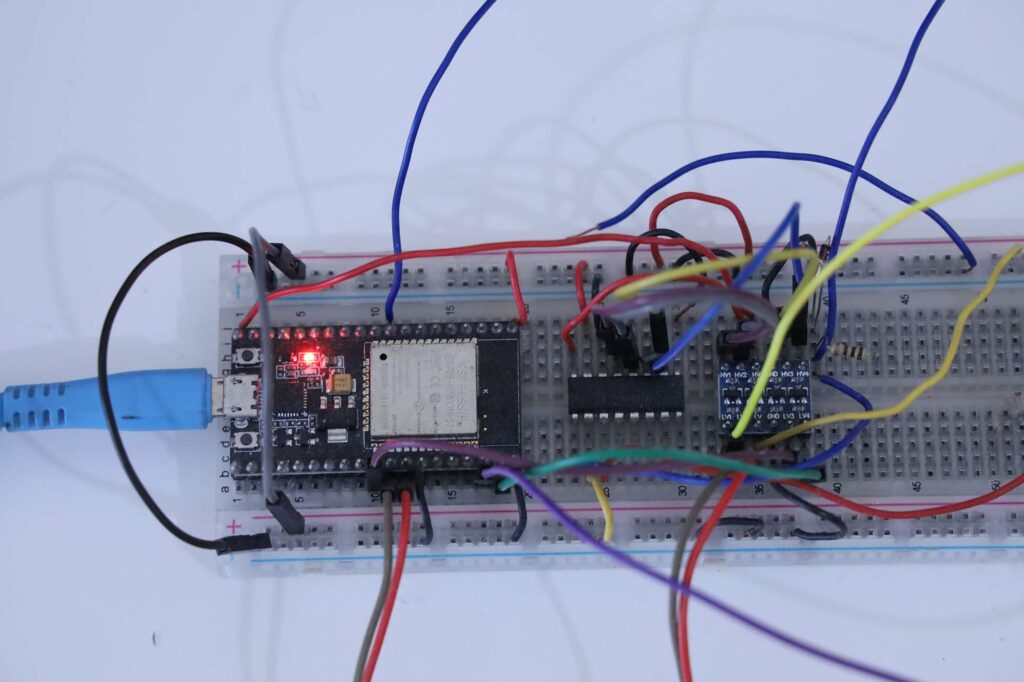
Rangkaian sistem adalah sebagai berikut
Kode yang dipakai untuk pengujian adalah sebagai berikut:
// idea from https://learn.sparkfun.com/tutorials/mcp4725-digital-to-analog-converter-hookup-guide/all
#define MCP4725_ADDR 0x60
#include <Wire.h> //Include the Wire library to talk I2C
int counter; // how many iterations
int time_begin = 0;
int time_end = 0;
int duration;
void setup() {
Wire.begin();
Serial.begin(115200);
counter = 0;
Serial.println("start benchmark");
}
//---------------------------------------------------
void loop() {
int value; // angka yang ditulis
value = 0; // minimum value
Wire.beginTransmission(MCP4725_ADDR);
Wire.write(64); // cmd to update the DAC
Wire.write(value >> 4); // the 8 most significant bits...
Wire.write((value & 15) << 4); // the 4 least significant bits...
Wire.endTransmission();
value = 4095; // maximum value
Wire.beginTransmission(MCP4725_ADDR);
Wire.write(64); // cmd to update the DAC
Wire.write(value >> 4); // the 8 most significant bits...
Wire.write((value & 15) << 4); // the 4 least significant bits...
Wire.endTransmission();
counter = counter + 1;
if (counter >= 10000) {
float period;
int time_now = millis();
counter = 0;
duration = time_now - time_begin;
period = duration / 10000.0 / 2.0 ;
Serial.print("period (ms): ");
Serial.println(period);
// prepare next round
time_begin = time_now;
}
}
I2C 100 kHz
ATmega328 menggunakan 2 frekuensi I2C: 100 kHz dan 400 kHz. Percoban pertama menggunakan kecepatan default adalah 100 kHz.
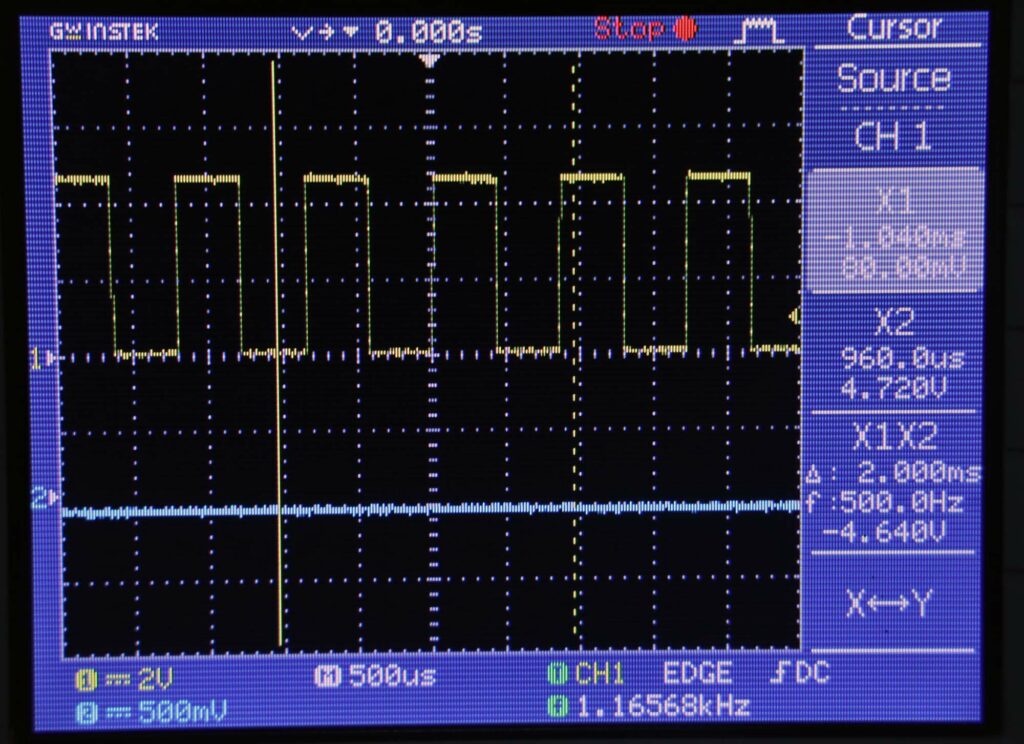
Sinyal yang dihasilkan pada output MCP4725 adalah sebagai berikut:
Tampilan pada serial monitor adalah sebagai berikut:
start benchmark
period (ms): 0.43
period (ms): 0.43
period (ms): 0.43
period (ms): 0.43
period (ms): 0.43
period (ms): 0.43
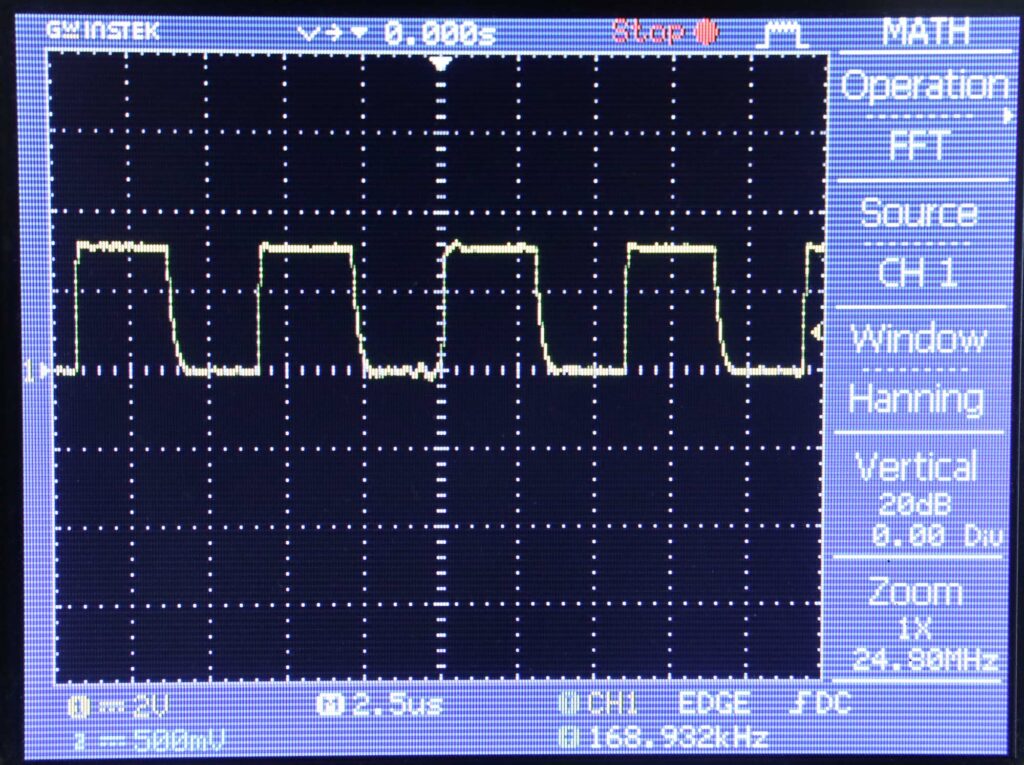
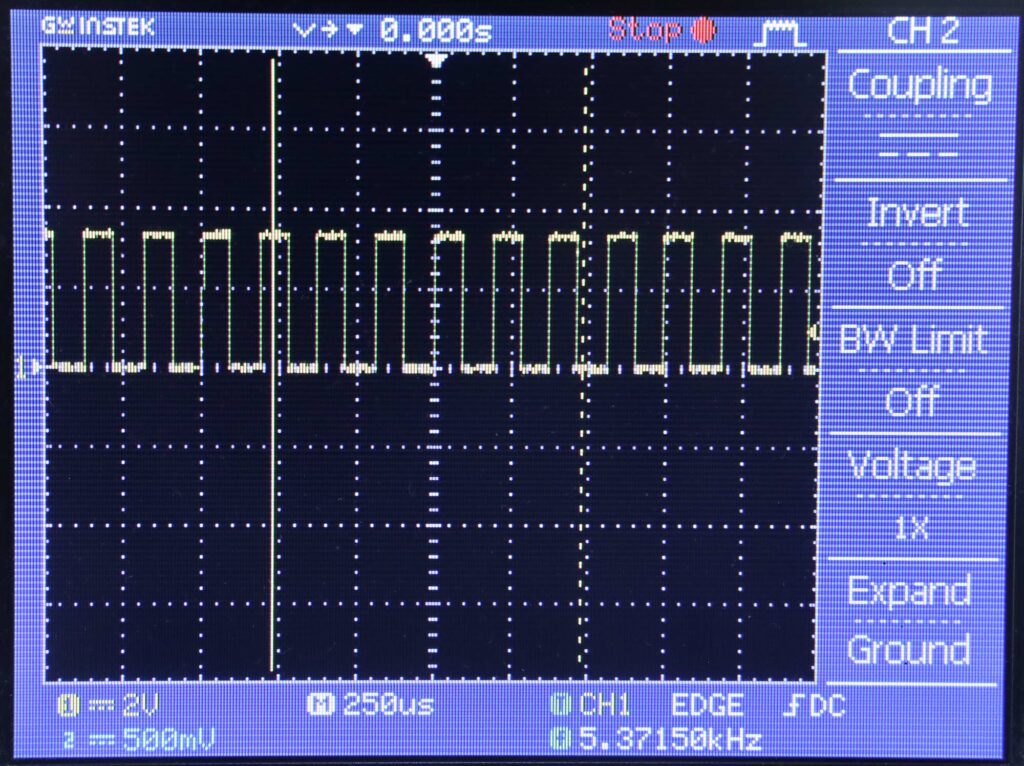
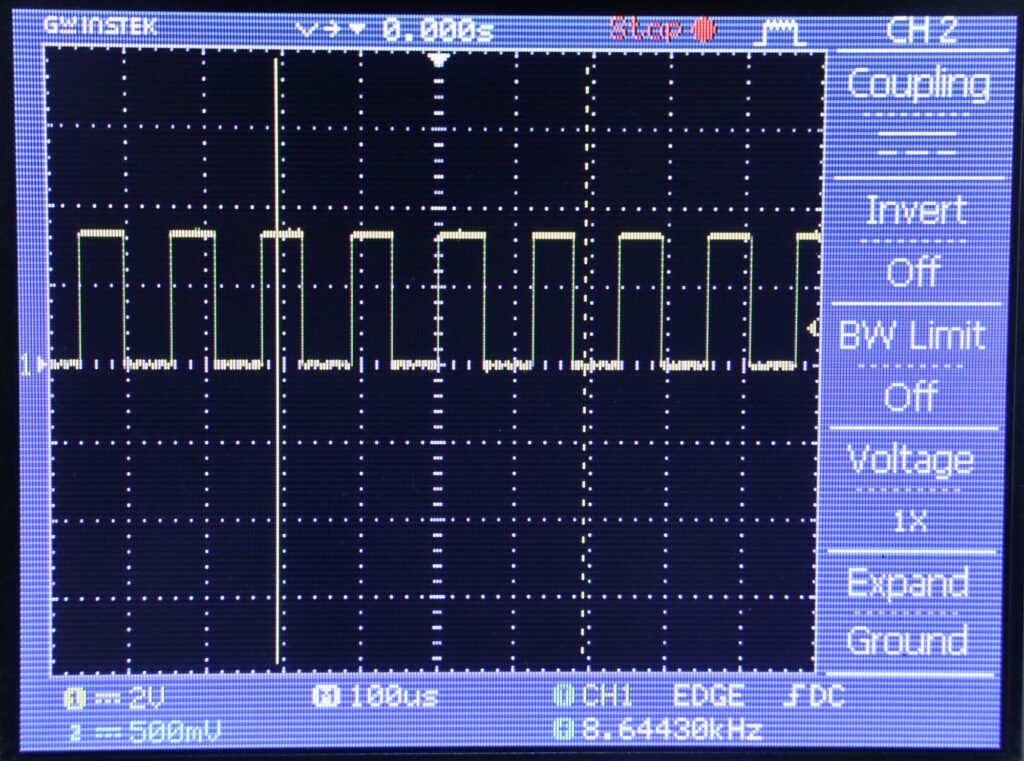
Pengukuran dengan osiloskop menunjukkan sinyal persegi dengan frekuensi 1,166 kHz
Jumlah transisi adalah 2x frekuensi ini, jadi frekuensi konversi adalah 1,166 x 2 = 2,332 kHz
I2C 400 kHz
Pada pengukuran ini, kecepatan I2C dinaikkan menjadi 400 kHz. Caranya menggunakan fungsi Wire.setClock()
Perioda menjadi 0,15 ms
start benchmark
period (ms): 0.15
period (ms): 0.15
period (ms): 0.15
period (ms): 0.15
period (ms): 0.15
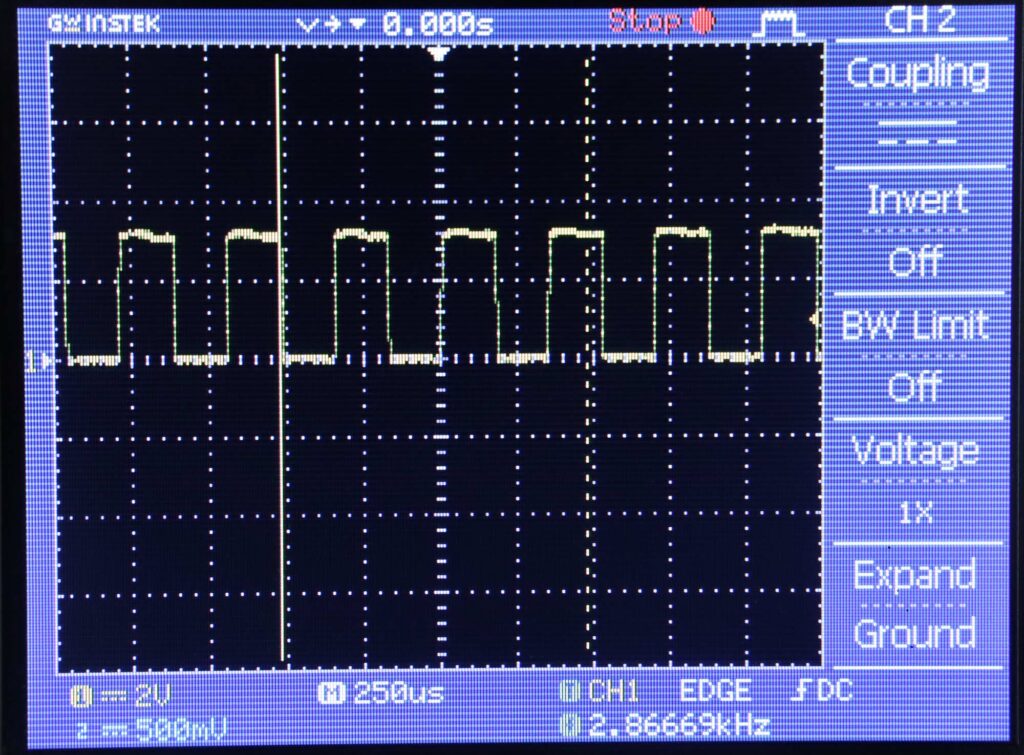
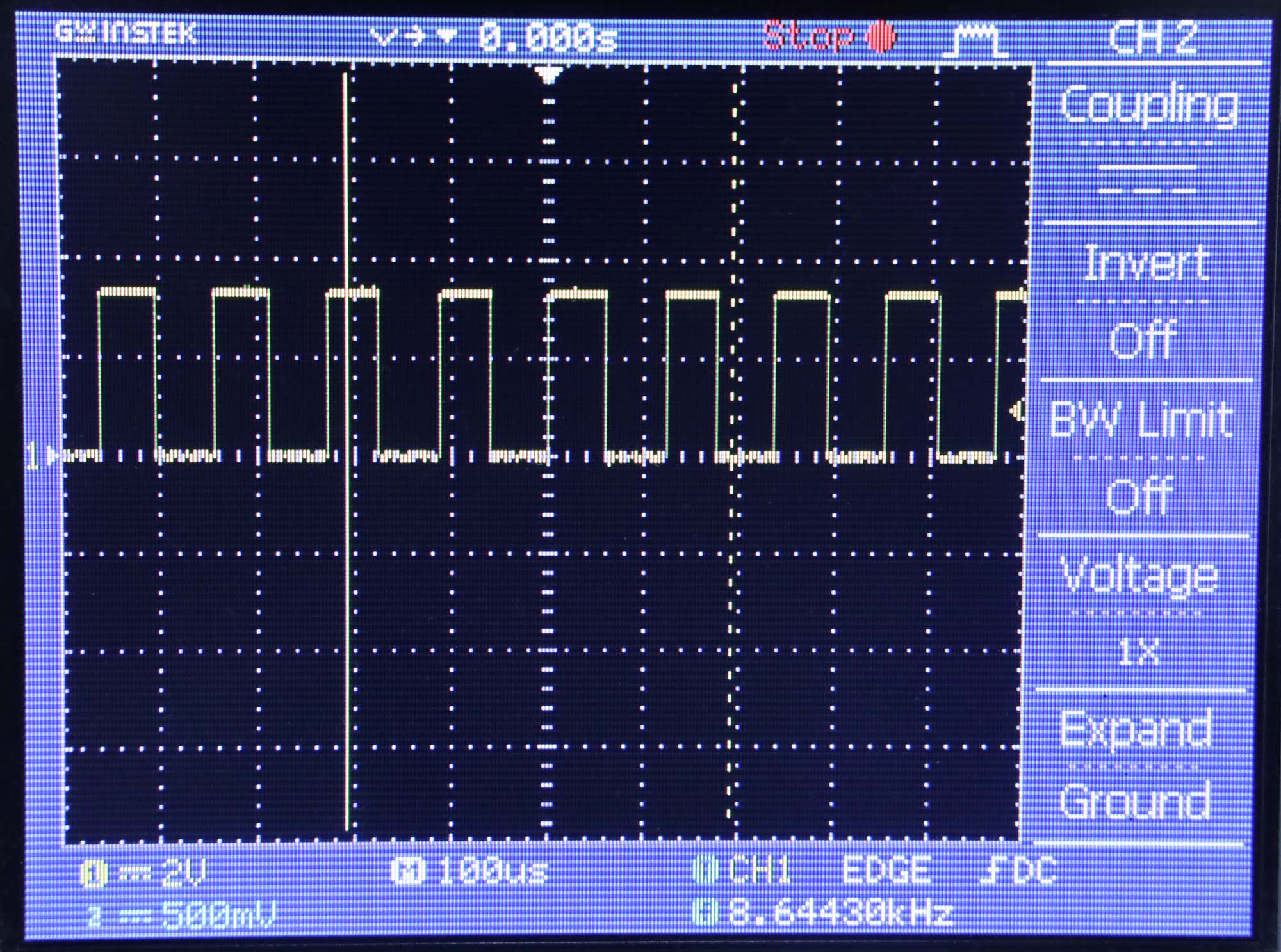
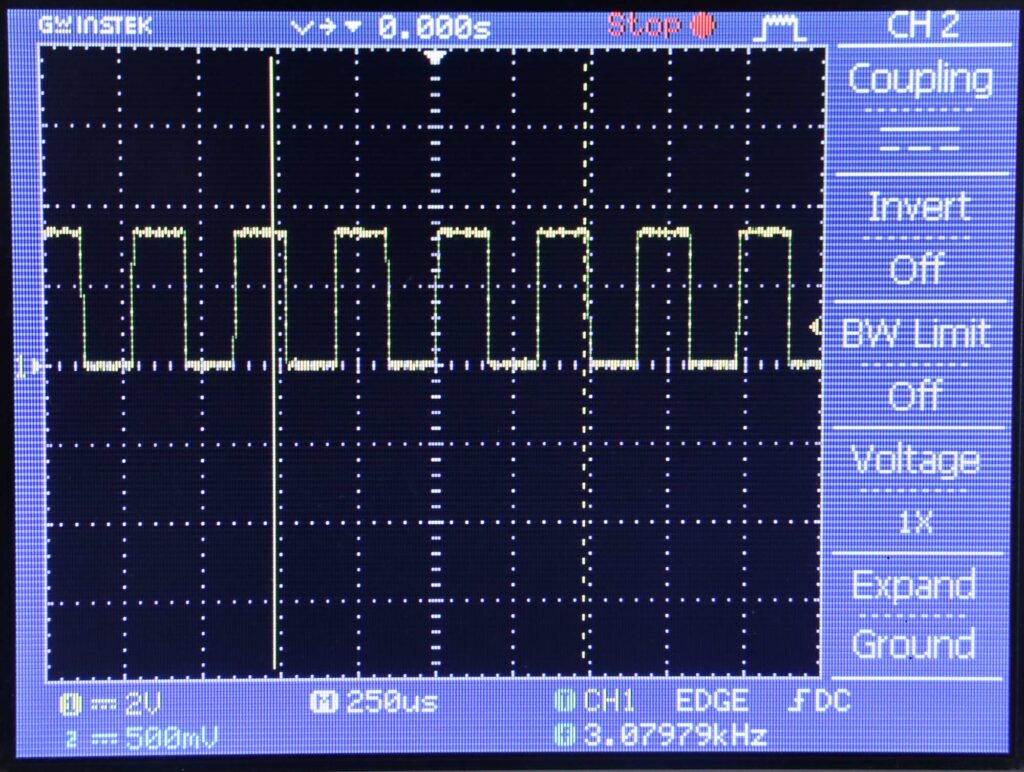
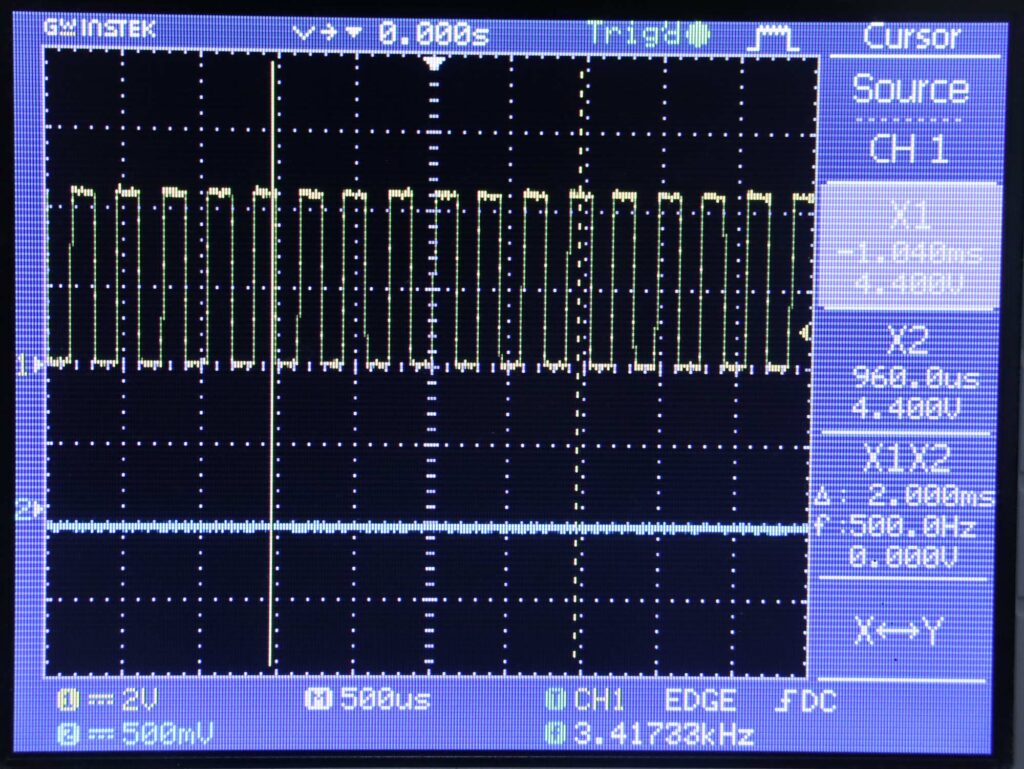
Output DAC diukur dengan osiloskop, dengan hasil sebagai berikut
Frekuensi output adalah 3,41733 kHz, sehingga frekuensi DAC adalah 2x 3,417 = 6,834 kHz