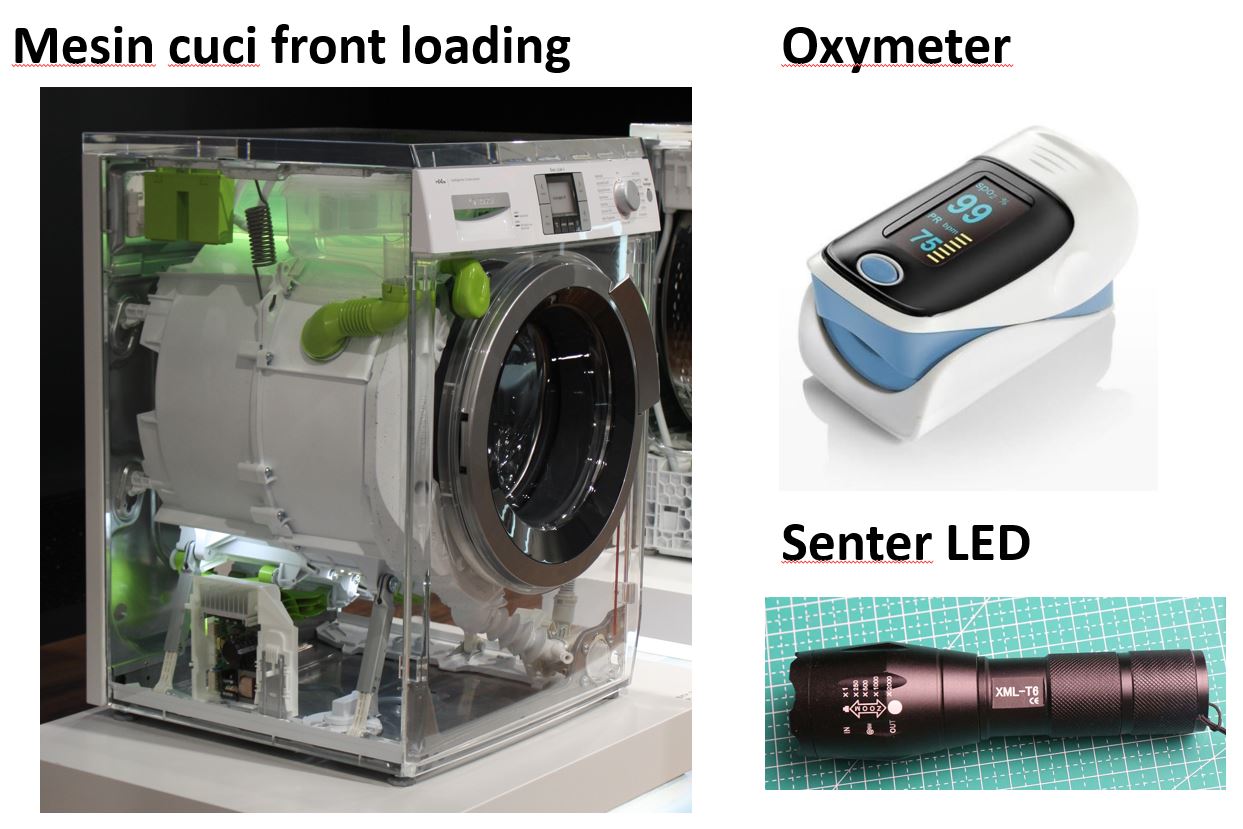
Berikut ini mesin cuci WF8590NHW dengan spesifikasi sangat sederhana: ” Top-Load dengan Diamond Drum – 6 Kg”. Sama sekali tidak disebut kemampuan prosesornya. Kalau dibongkar di dalamnya, terlihat sistem embedded di dalamnya menggunakan prosesor tipe TMP91FU62DFG. Prosesor tersebut memiliki kemampuan clock maksimum 20 MHz, ROM: 96K bytes (Flash ROM), RAM: 4K bytes.

Spesifikasi Mesin Cuci
Spesifikasi ringkas: Top-Load dengan Diamond Drum – 6 Kg
Sumber: Situs resmi Samsung WF8590NHW
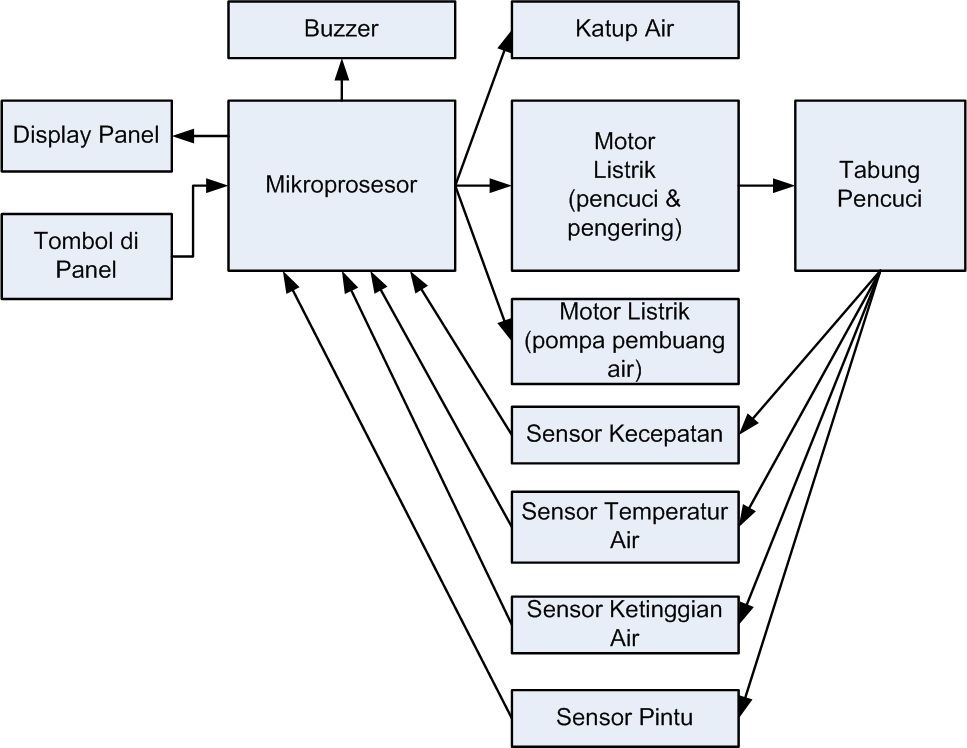
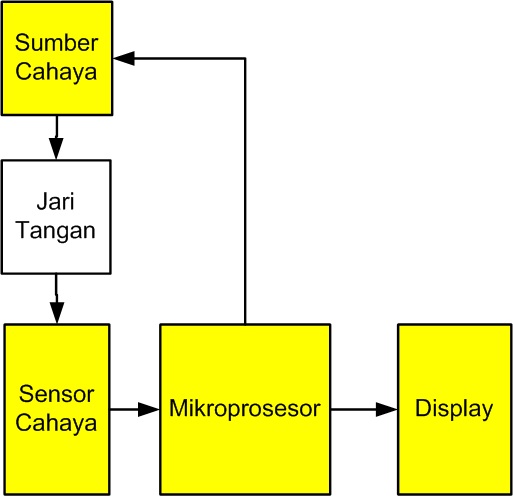
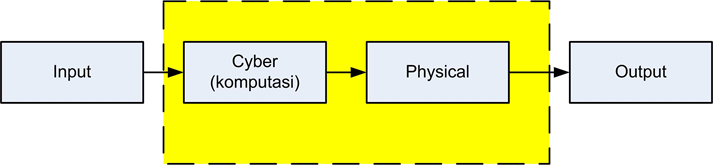
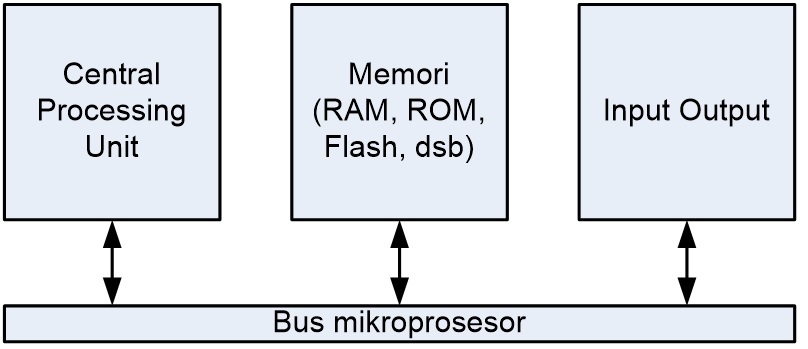
Sistem Embedded
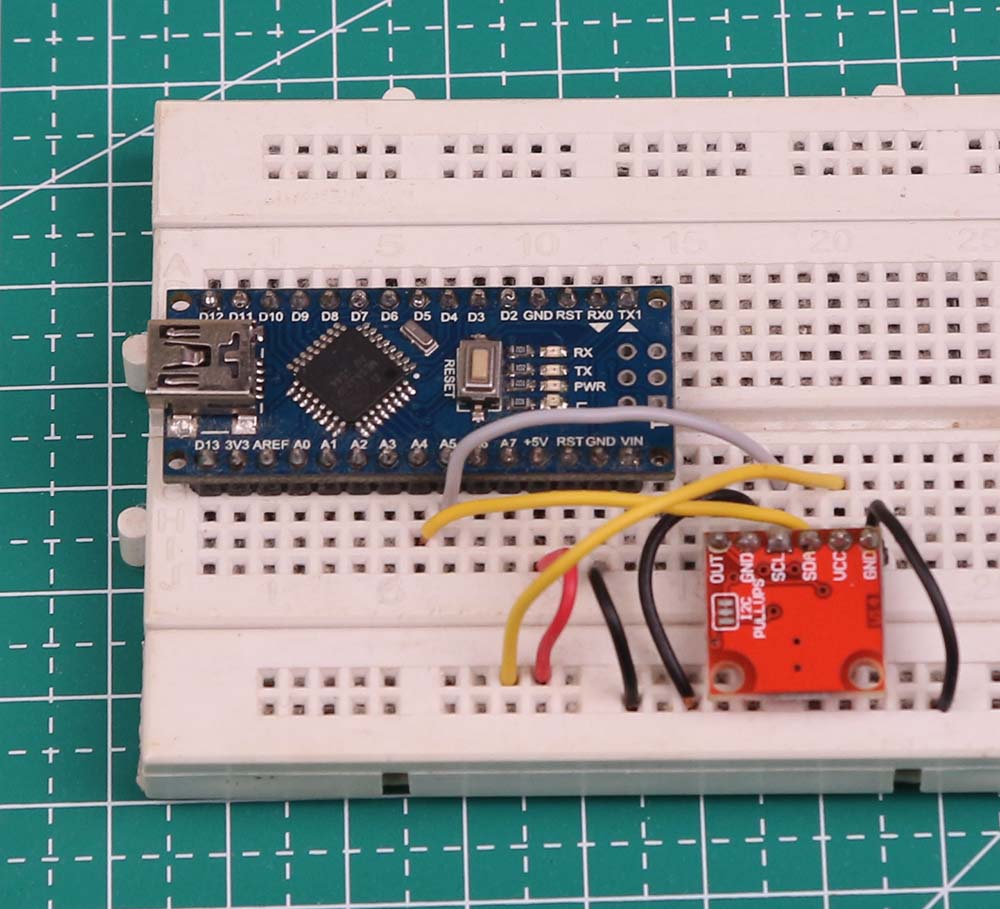
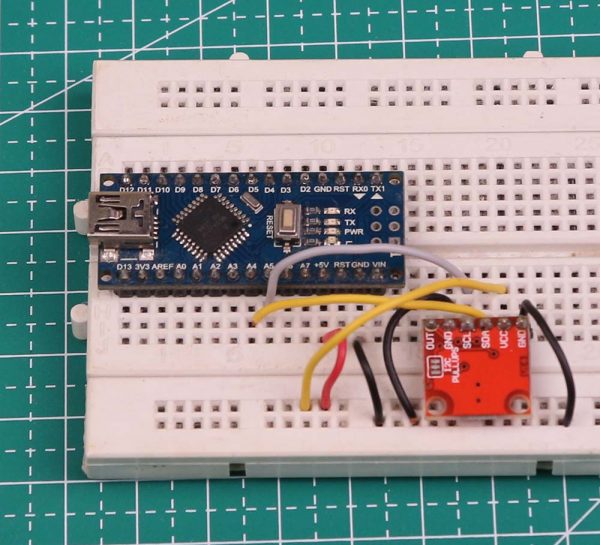
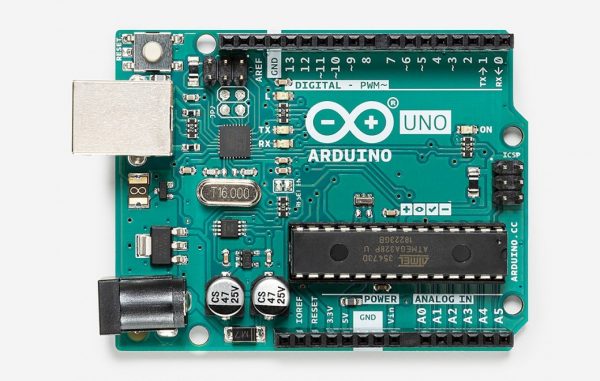
Berikut ini papan rangkaian pengendali mesin cuci tersebut. Ukuran papan rangkaian adalah panjang 26 cm, lebar 10 cm. Posisi papan rangkaian ini tepat di belakang panel. Pada papan rangkaian terlihat LED 7 segment di bagian kiri atas, LED ini sama dengan yang nampak di bagian atas depan mesin cuci.
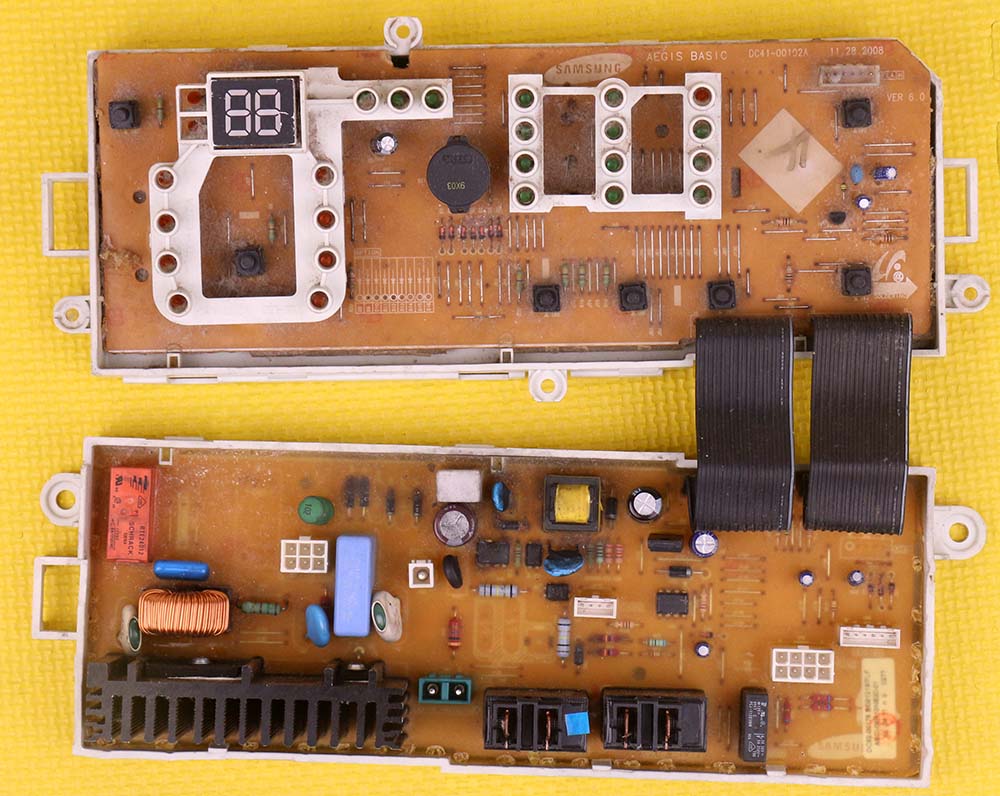
Berikut ini tampilan panel atas yang terletak tepat di depan papan rangkaian tersebut.

Mesin cuci ini menggunakan mikroprosesor buatan Toshiba tipe TMP91FU62DFG


Spesifikasi Prosesor TMP91FU62DFG
High-speed 16-bit CPU (900/L1 CPU)
- Instruction mnemonics are upward-compatible with TLCS-900,900/H,900/L
- 16 Mbytes of linear address space
- General-purpose registers and register banks
- 16-bit multiplication and division instructions; bit transfer and arithmetic instructions
- Micro DMA: 4 channels (800ns/2 bytes at 20MHz)
- Minimum instruction execution time:200ns (at 20MHz)
- Built-in memory
– ROM: 96K bytes (Flash ROM)
– RAM: 4K bytes - 8-bit timers: 4 channels
- 16-bit timers: 4 channels
- General-purpose serial interface: 4 channels
– UART/Synchronous mode: 3 channels
– I2C bus mode: 1 channels - 10-bit AD converter (Built-in Sample hold circuit): 16 channels
- Special timer for CLOCK
- Watchdog timer
- Program patch logic: 6 banks
- Interrupts: 48 interrupts
– 9 CPU interrupts: Software interrupt instruction and illegal instruction
– 30 internal interrupts: 7 priority levels are selectable
– 9 external interrupts: 7 priority levels are selectable (among 1 interrupts are selectable edge mode) - Input/output ports: 69 pins
- Standby function: Three HALT modes: IDLE2 (Programmable), IDLE1 and STOP
- Clock controller
– Clock gear function: Select a High-frequency clock fc/1 to fc/16
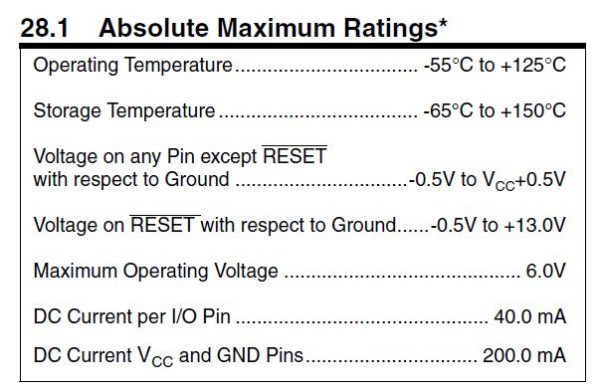
– Oscillator for CLOCK (fs = 32.768 kHz) - Operating voltage
Flash read operation
> Vcc=4.5 V – 5.5 V (fc max = 20MHz)
Flash write/erase operation
> Vcc=4.75 V – 5.25 V (fc max = 20MHz) - Package
– LQFP80-P-1212-0.50E (TMP91FU62FG)
– QFP80-P-1420-0.80B (TMP91FU62DFG)
Referensi

















{kind=link}