R-2R DACs and Delta-Sigma DACs are two popular types of digital-to-analog converters with distinct advantages and disadvantages.
Delta-Sigma DACs are more popular than R-2R DACs for a few reasons:
-
Better performance: Delta-Sigma DACs can achieve higher resolution and lower distortion than R-2R DACs, making them better suited for applications that demand high accuracy and fidelity, such as high-end audio.
-
Lower cost: Delta-Sigma DACs are widely used in consumer electronics, which has driven down the cost of manufacturing and made them more affordable than R-2R DACs in many cases.
-
Lower power consumption: Delta-Sigma DACs typically consume less power than R-2R DACs, making them well-suited for battery-powered devices.
-
Greater design flexibility: Delta-Sigma DACs offer greater design flexibility than R-2R DACs, as they can be implemented using a variety of architectures and can be optimized for different performance parameters depending on the application.
One of the key advantages of an R-2R DAC is its simplicity and linearity. R-2R DACs use a resistor network to convert digital data into analog signals, making them easy to design, manufacture and operate. This results in highly accurate, predictable and linear output signals, which are essential for applications such as audio, video, and measurement equipment. Additionally, R-2R DACs are relatively immune to jitter, noise and other digital signal distortions.
There are some recent improvement in R-2R technology such as the Soekris Discrete R-2R Sign Magnitude Technology
R-2R DACs may be more popular in certain specialized applications, particularly those that require high linearity and accuracy, such as high-end audio equipment. R-2R DACs have a simpler architecture than Delta-Sigma DACs, which can result in better linearity and lower noise, making them better suited for such applications.
In summary, the advantage of R-2R DACs lies in their simplicity and linearity, while Delta-Sigma DACs excel in noise shaping and dynamic range. The choice between the two types of DACs ultimately depends on the specific application requirements and trade-offs between accuracy, speed, resolution, and cost.
What is R-2R DAC
R-2R DAC (Digital-to-Analog Converter) is a type of DAC architecture that uses a network of resistors to convert digital signals into analog signals. It is named after the two types of resistors used in the network: “R” denotes the equal value resistors and “2R” denotes the double value resistors.
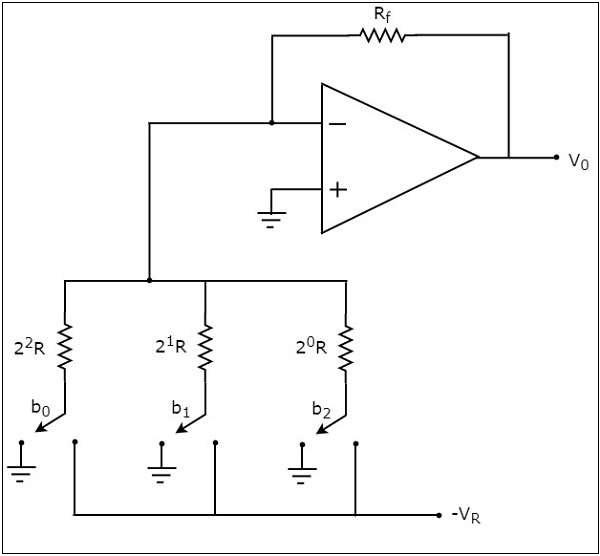
In an R-2R DAC, the input digital signal is first converted into binary format and then applied to the resistor network. Each bit of the digital signal is connected to an individual resistor. The values of these resistors are chosen in such a way that the voltage output at the end of the resistor network is proportional to the input digital signal. By adjusting the values of these resistors, the resolution of the DAC can be increased.
One advantage of R-2R DACs is their simplicity and linearity, which makes them well suited for high-performance audio applications. However, they can be more expensive and less power-efficient than other types of DACs, such as Delta-Sigma DACs.
Here is an example of simple 3 bit R-2R DAC circuit.
What is Delta Sigma DAC
Delta-Sigma DAC (Digital-to-Analog Converter) is a type of DAC architecture that uses a technique called delta-sigma modulation to convert digital signals into analog signals. This technique is based on oversampling the input signal at a high rate and then using a feedback loop to filter out the noise and reconstruct the analog signal.
In a delta-sigma DAC, the input digital signal is first oversampled at a very high frequency. The oversampled signal is then filtered using a digital filter that removes the noise and distortion. The resulting signal is then converted to an analog signal using a simple low-pass filter.
Delta-Sigma DACs offer several advantages over other types of DACs. They provide a high signal-to-noise ratio, which means that the output signal is very clean and free from noise and distortion. They are also very power-efficient, as they can be implemented using digital circuitry. However, they may be more complex and less linear than other types of DACs, such as R-2R DACs. Delta-Sigma DACs are commonly used in audio and digital communication systems, where high-quality output and low power consumption are critical.
Example of R-2R DAC
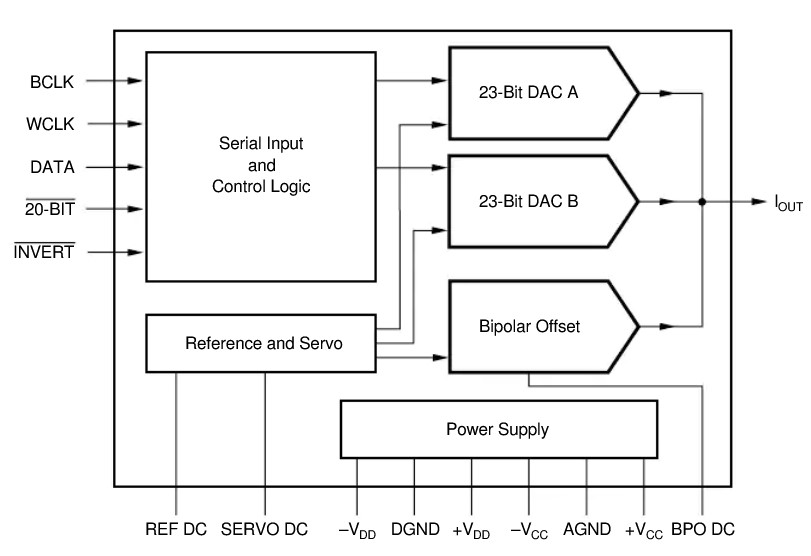
One example of an R-2R DAC that is commonly used in high-performance audio applications is the Burr-Brown PCM1704. This 24-bit DAC features a resistor ladder network that enables highly accurate and linear digital-to-analog conversion, making it well-suited for high-end audio applications. The PCM1704 has a dynamic range of over 120dB and a THD+N (total harmonic distortion plus noise) of -110dB, making it a popular choice among audiophiles and audio equipment manufacturers. The DAC is often used in high-end digital-to-analog converters, preamplifiers, and other audio equipment where accuracy and linearity are critical.
Block diagram of PCM1704 DAC
PCM1704 is already obsolete. For new products, we can use other DAC such as DACx1001 from Texas Instruments
R-2R DAC is used in some high-end audio devices, such as SE300 from Astell & Kern.

Also Hiby RS8

Example of Delta Sigma DAC
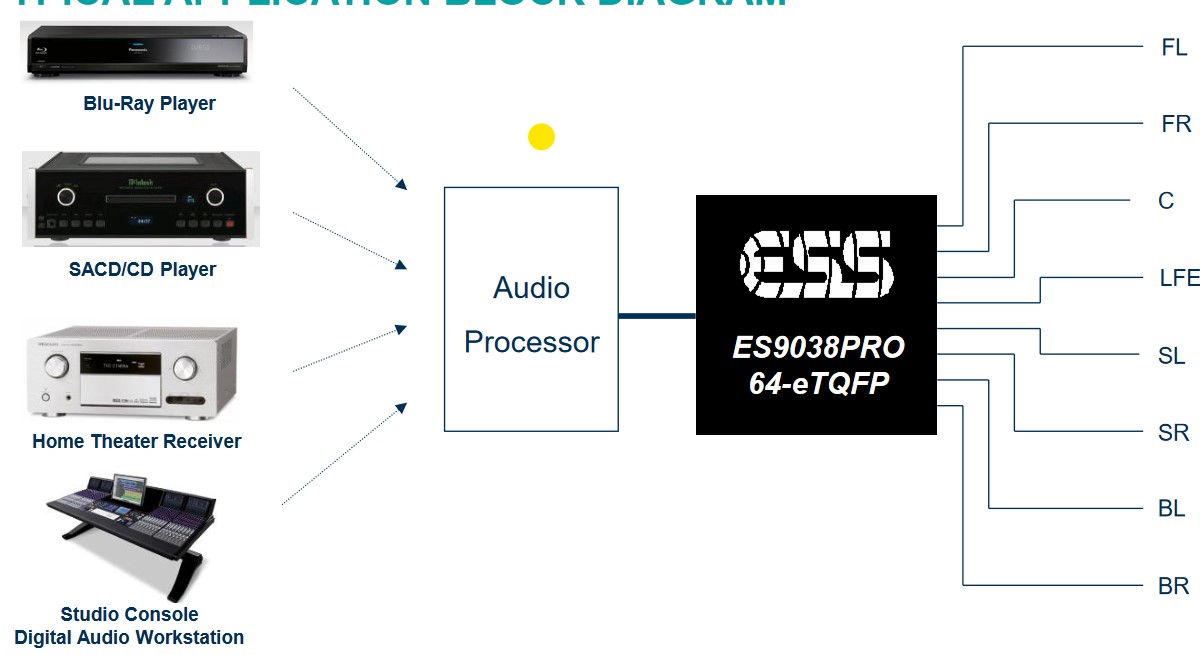
One example of a Delta-Sigma DAC that is commonly used in high-performance audio applications is the ESS Sabre ES9038PRO. This 32-bit DAC uses a multi-bit Delta-Sigma architecture that enables high-precision digital-to-analog conversion with very low noise and distortion. The ES9038PRO is designed for use in high-end audio equipment and has a dynamic range of 140dB and a THD+N of -122dB, making it one of the best performing Delta-Sigma DACs on the market. The DAC is often used in high-end digital-to-analog converters, headphones amplifiers, and other audio equipment where high resolution and low noise are critical.
Here is a typical usage of ESS ES9038PRO
References
- Delta Sigma Modulation
- Resistor Lader
- R-R2 Digital to Analog Converter
- ESS ES9038PRO Audio DAC
- PCM 1704
- https://www.electronics-tutorials.ws/combination/r-2r-dac.html
- PCM1704 Datasheet (Digikey)
- The Soekris Discrete R-2R Sign Magnitude Technology