Rumah dengan listrik 5500 VA dapat dipakai sampai berapa watt?
Jawab: P = V x I x cos phi
Dengan
P : daya listrik (dalam watt)
V: tegangan jala-jala listrik (dalam volt)
I: arus listrik (dalam ampere)
cos phi: faktor daya (antara 0 sampai 1)
V x I ini adalah “5500 VA” yang merupakan daya terpasang di rumah
Pada kondisi ideal, faktor daya adalah 1. Maka daya maksimum adalah : 5500 watt
Jika di rumah banyak beban induktif seperti pompa, AC, kulkas, kipas, maka faktor daya biasanya sekitar 0,7. Maka daya maksimum = P = 5500 x 0,7 = 3850 watt.
Tegangan normal di rumah-rumah adalah 220 volt. Namun sering tegangan turun, misal sampai ke 200 volt. Akibat tegangan turun, daya akan lebih kecil lagi.
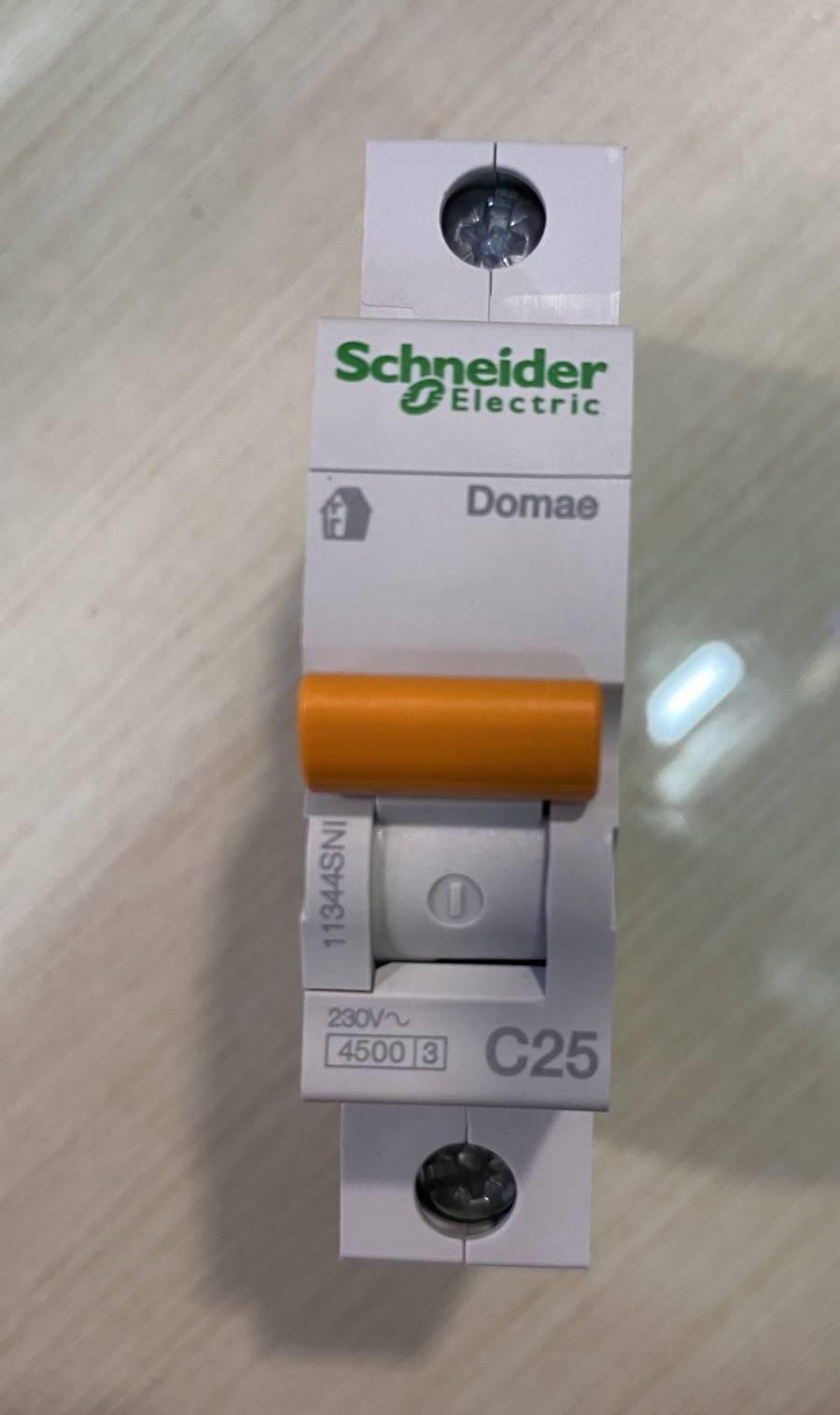
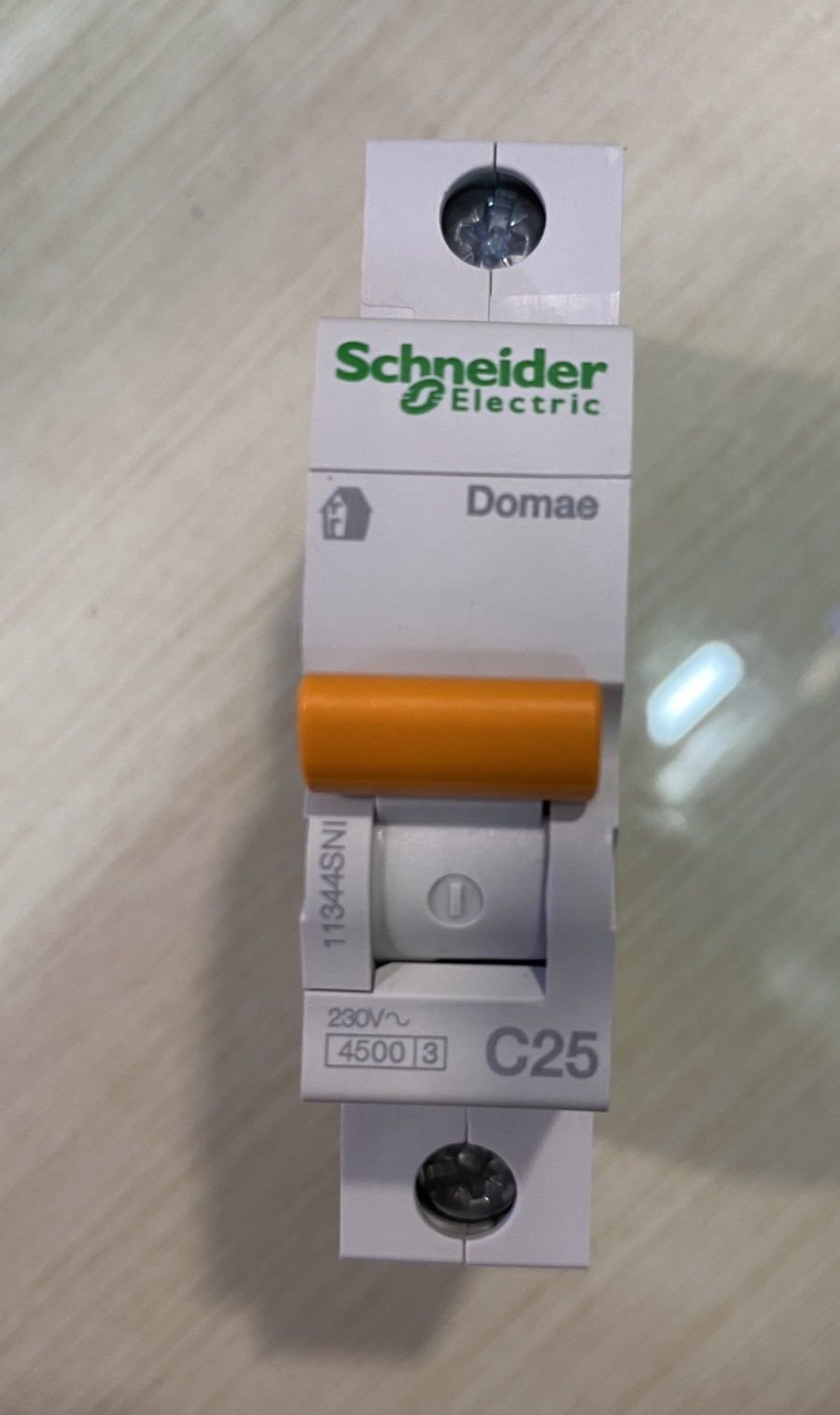
5500 VA pada tegangan 220 volt, artinya arus = 5500/220 = 25 ampere. Besaran ini sesuai dengan ukuran MCB yang terpasang di panel listrik.
Pada kondisi non ideal: tegangan 220 volt, faktor daya 0,7 , arus maksimum tetap 25 ampere. Maka daya sebagai berikut:
P = P x I x faktor daya = 220 x 25 x 0,7 = 3500 watt
Kesimpulan:
5500 VA memberikan daya maksimum 5500 watt pada kondisi ideal
5500 VA memberikan daya maksimum 3500 watt pada kondisi non ideal (tegangan turun ke 200 volt, faktor daya = 0,7)
Berikut ini contoh MCB dengan kapasitas 25 ampere. MCB ini biasa dipasang untuk membatasi arus sampai 25 ampere, artinya daya (VA) = 5500 VA
Beberapa smartphone model terbaru (tahun 2022) dapat dicharge dengan charger 25 watt. Untuk mendapatkan daya 25 watt tersebut, berapakah arusnya (dalam ampere)?
Jawaban ringkas: arus adalah 3 ampere atau 2,77 ampere.
// CJMCU-8118
#include <WiFi.h> // WiFi control for ESP32
#include <ThingsBoard.h> // ThingsBoard SDK
#include <esp_task_wdt.h>
// WiFi access point
#define WIFI_AP_NAME "APNAME" // ganti dengan WIFI AP
// WiFi password
#define WIFI_PASSWORD "123456" // ganti dengan WIFI AP password
#define TOKEN "zRG1HN8w0PRydh5gV7Il"
#define LED_SENSOR 23
#define ADC_INPUT 34
#define BUILTIN_LED 2
#define WDT_TIMEOUT 60
// ThingsBoard server instance.
#define THINGSBOARD_SERVER "192.168.0.114"
#include <Arduino.h>
#include <Wire.h>
// Initialize ThingsBoard client
WiFiClient espClient;
// Initialize ThingsBoard instance
ThingsBoard tb(espClient);
// the Wifi radio's status
int status = WL_IDLE_STATUS;
// main application loop delay (ms)
int quant = 20;
// Period of sending a temperature/humidity data.
int send_delay = 2000;
// Time passed after telemetry data was sent, milliseconds.
int send_passed = 0;
char mac_str[20]; // storing MAC address string
byte mac_byte[6]; // storing MAC address bytes
int led_counter = 0; //blinking built int led
void setup() {
pinMode(BUILTIN_LED, OUTPUT);
pinMode(LED_SENSOR, OUTPUT);
// put your setup code here, to run once:
Serial.begin(115200);
delay(1000);
Serial.print("Source Code: ");
Serial.println(__FILE__);
//wait for serial connection to open (only necessary on some boards)
while (!Serial);
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
InitWiFi();
WiFi.macAddress(mac_byte);
sprintf(mac_str, "%02x%02x%02x%02x%02x%02x", mac_byte[0], mac_byte[1], mac_byte[2], mac_byte[3], mac_byte[4], mac_byte[5]);
Serial.print("ESP board MAC address: ");
Serial.println(WiFi.macAddress());
Serial.print("ESP board IP address: ");
Serial.println(WiFi.localIP());
// setup WDT
esp_task_wdt_init(WDT_TIMEOUT, true); //enable panic so ESP32 restarts
esp_task_wdt_add(NULL); //add current thread to WDT watch
}
void loop() {
float temperature = 25;
float pressure = 0;
float humidity = 60; // default humidity
float co2 = 0;
float tvoc = 0;
delay(quant);
send_passed += quant;
// Reconnect to WiFi, if needed
if (WiFi.status() != WL_CONNECTED) {
reconnect();
return;
}
// Reconnect to ThingsBoard, if needed
if (!tb.connected()) {
// Connect to the ThingsBoard
Serial.print("Connecting to: ");
Serial.print(THINGSBOARD_SERVER);
Serial.print(" with token ");
Serial.println(TOKEN);
if (!tb.connect(THINGSBOARD_SERVER, TOKEN)) {
Serial.println("Failed to connect");
return;
}
}
// Check if it is a time to send sensor data
if (send_passed > send_delay) {
int dust;
dust = DustRead();
Serial.print("Sending telemetry data...");
Serial.print("Dust ");
Serial.print(dust);
Serial.println("");
tb.sendTelemetryFloat("dust", dust);
send_passed = 0;
}
// Process messages
tb.loop();
led_counter++; // LED blink at 1 Hz
if (led_counter > 50) {
led_counter = 0;
}
if (led_counter > 25) {
digitalWrite(BUILTIN_LED , LOW);
} else {
digitalWrite(BUILTIN_LED , HIGH);
}
esp_task_wdt_reset(); // WDT reset setelah berhasil mengirim data
}
void I2C_Scan() {
byte error, address;
int nDevices;
Serial.println("I2C Scanning...");
nDevices = 0;
for (address = 1; address < 127; address++ ) {
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0) {
Serial.print("I2C device found at address 0x");
if (address < 16) {
Serial.print("0");
}
Serial.println(address, HEX);
nDevices++;
}
else if (error == 4) {
Serial.print("Unknow error at address 0x");
if (address < 16) {
Serial.print("0");
}
Serial.println(address, HEX);
}
}
if (nDevices == 0) {
Serial.println("No I2C devices found\n");
}
else {
Serial.println("done\n");
}
}
void InitWiFi()
{
Serial.println("Connecting to AP ...");
// attempt to connect to WiFi network
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("Connected to AP");
}
void reconnect() {
// Loop until we're reconnected
status = WiFi.status();
if ( status != WL_CONNECTED) {
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("Connected to AP");
}
}
int DustRead() {
int sensorValue;
// read the analog in value:
digitalWrite(LED_SENSOR, HIGH);
delayMicroseconds(280);
sensorValue = analogRead(ADC_INPUT); // measurement 280 us after signal start
delayMicroseconds(40); // total signal duration 320 us
digitalWrite(LED_SENSOR, LOW); // turn off LED
// print the results to the Serial Monitor:
Serial.print("sensor = ");
Serial.println(sensorValue);
return sensorValue;
}
Cara mengubah IPAddress menjadi char[] di Arduino – class IPAddress memiliki fungsi toString untuk mengubah ke String – class String memiliki fungsi c_str untuk mengubah ke pointer character
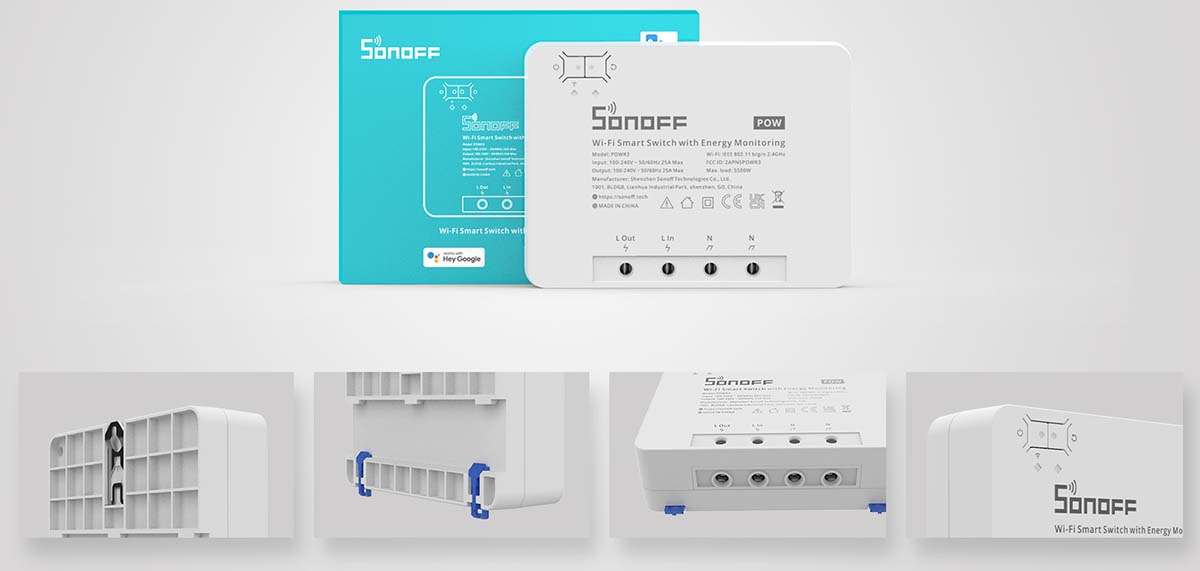
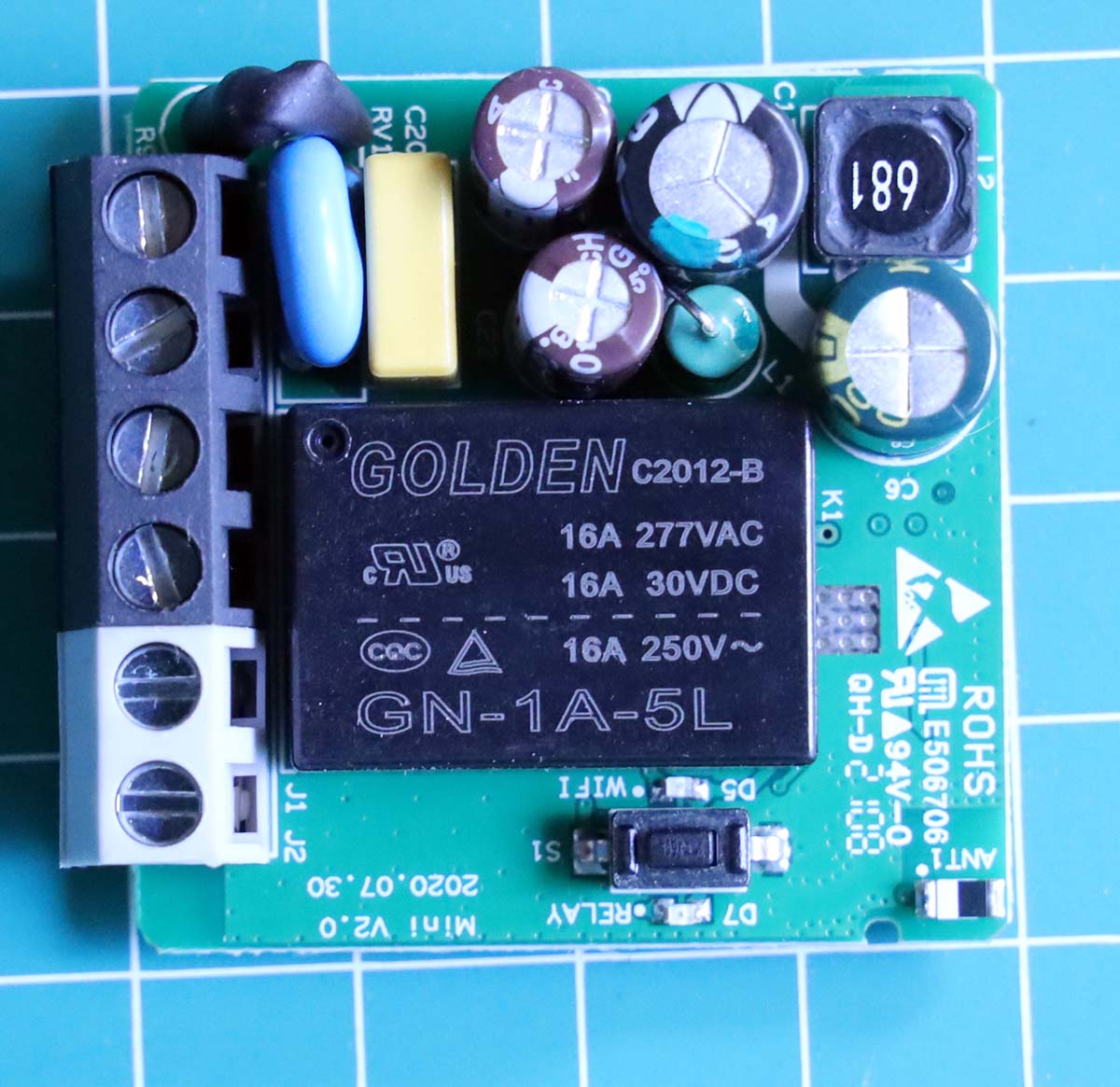
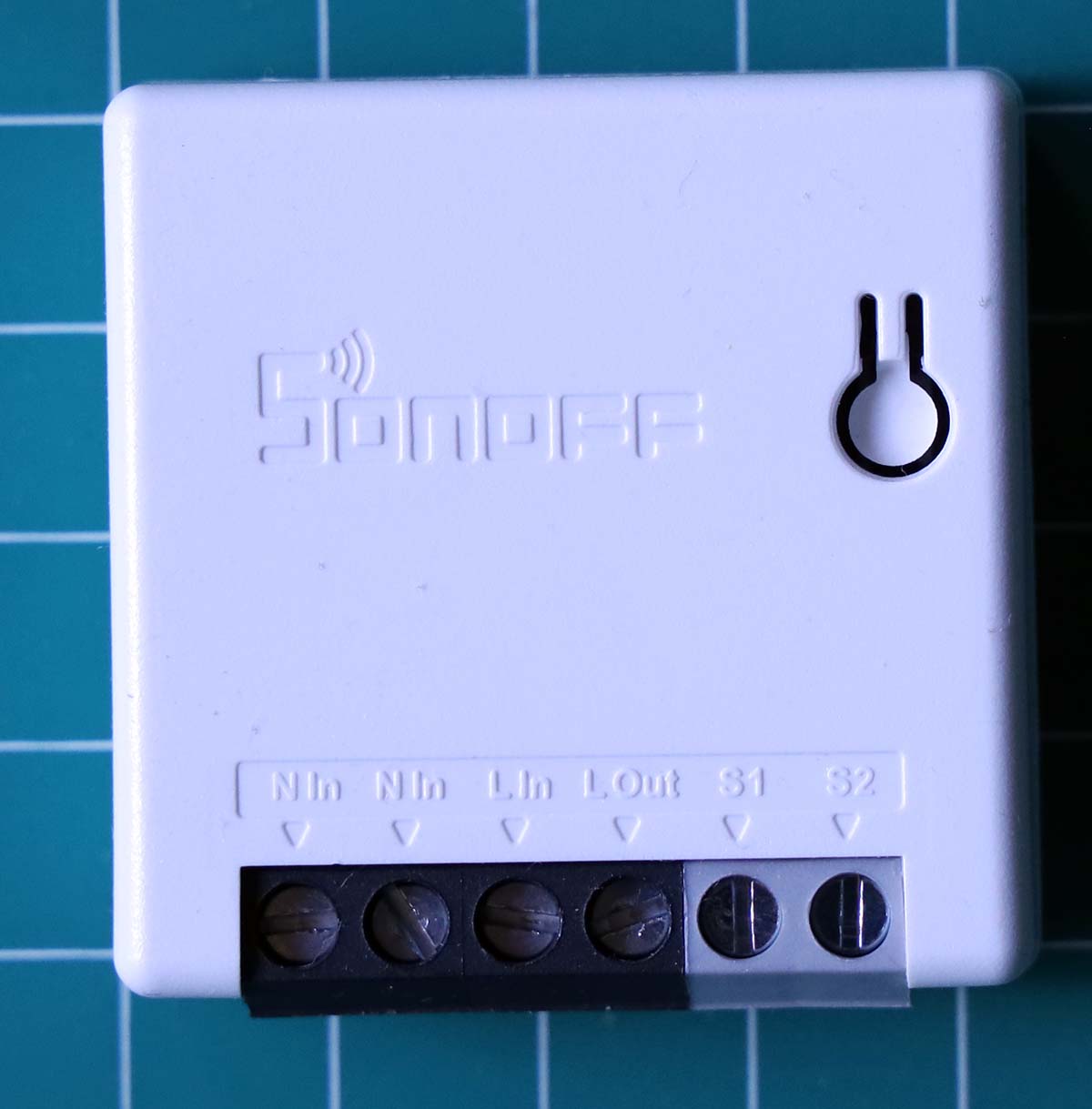
Produk-produk tersebut tidak memiliki fitur DIY (Do It Yourself) seperti MINIR2. Jadi jika ingin dipakai sebagai perangkat IoT (Internet of Things) sendiri, kita mesti mengganti firmware di dalamnya (flashing)
Berikut ini daftar teknik flashing untuk produk tersebut
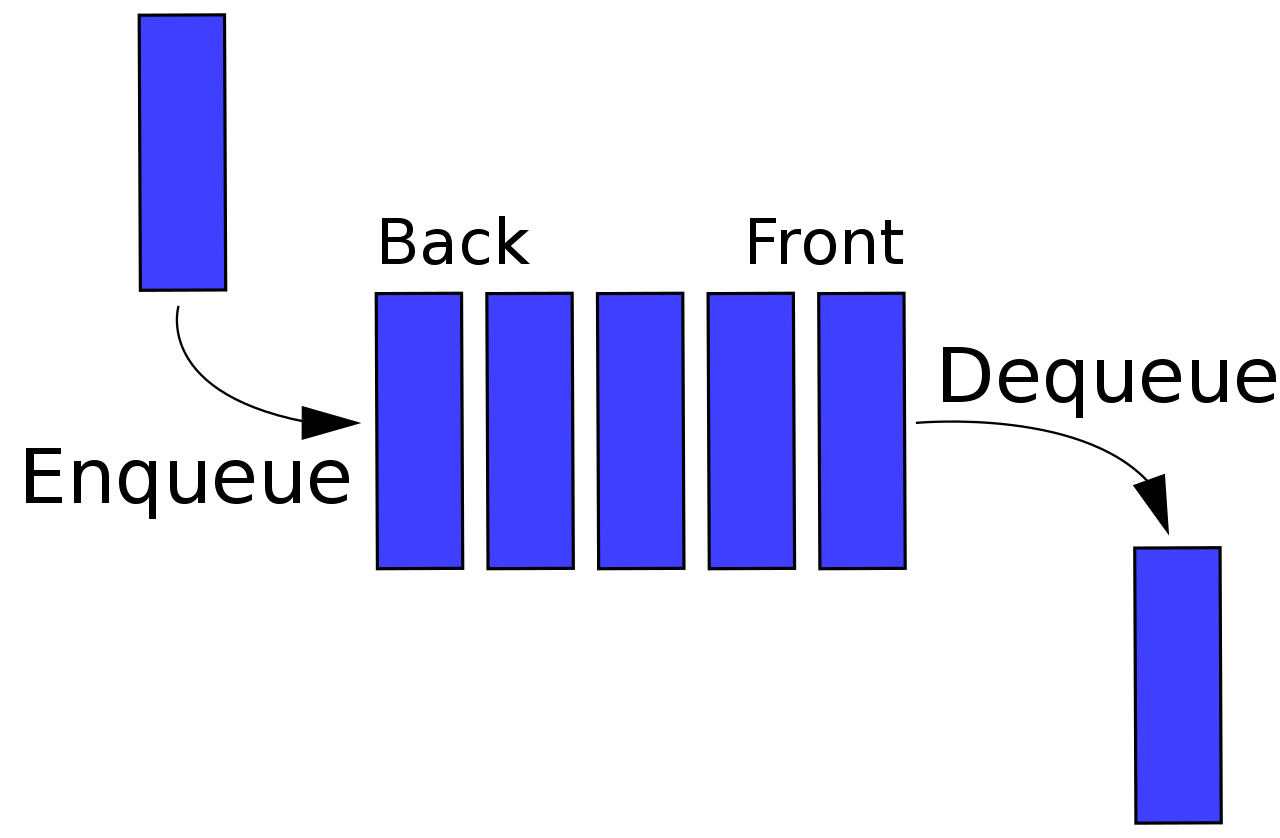
Arduino Nano dapat melakukan komunikasi serial baik transmit (mengirim) maupun receive (menerima). Pada library Arduino, sudah disiapkan buffer FIFO (First In First Out) pada data yang dikirimkan maupun data yang diterima. Pada tulisan ini dilakukan pengecekan berapa ukuran buffer tersebut. Pengujian ini dilakukan pada Arduino Nano dengan prosesor ATmega328. Untuk prosesor lain, ada kemungkinan ukuran buffernya berbeda.
Library Arduino untuk komunikasi serial memiliki buffer FIFO untuk outgoing maupun incoming.
Hardware yang diperlukan:
Komputer Desktop PC / Laptop
Arduino Nano Atmega328
Kabel USB
Buffer Pengiriman
Ukuran buffer pengiriman yang tersisa dapat dicek dengan fungsi Serial.availableForWrite() . Pada kondisi awal seharusnya buffer yang tersisa adalah maksimal, karena belum ada karakter yang dikirim.
Contoh program:
void setup() {
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
int incomingByte ;
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000);
incomingByte = Serial.availableForWrite();
Serial.print("jumlah available: ");
Serial.println(incomingByte, DEC);
}
Output seperti sebagai berikut
14:42:26.343 -> jumlah available: 63
Artinya ukuran bufffer outgoing adalah 63 karakter
Buffer Penerimaan
Ukuran buffer data masuk (receive) dapat dicek dengan fungsi Serial.available
Contoh program
void setup() {
Serial.begin(115200);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
int incomingByte ;
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000);
incomingByte = Serial.availableForWrite();
Serial.print("jumlah available: ");
Serial.println(incomingByte, DEC);
}
Setelah itu kirimkan beberapa karakter dari PC ke Arduino. Angka yang ditampilkan akan naik, namun akan berhenti di suatu batas tertentu. Angka inilah yang menunjukkan ukuran buffer FIFO incoming.
Dari hasil percobaan didapatkan rekaman komunikas serial sebagai berikut
14:37:37.062 -> jumlah available: 0
14:37:39.051 -> jumlah available: 0
14:37:41.043 -> jumlah available: 30
14:37:43.038 -> jumlah available: 43
14:37:45.064 -> jumlah available: 54
14:37:47.057 -> jumlah available: 63
14:37:49.050 -> jumlah available: 63
14:37:51.042 -> jumlah available: 63
14:37:53.067 -> jumlah available: 63
14:37:55.058 -> jumlah available: 63
14:37:57.050 -> jumlah available: 63
Artinya jumlah data yang menunggu untuk dibaca oleh software adalah maksimum 63 karakter.
Pada tulisan ini akan diuraikan bagaimana membuat filter digital dalam bahasa C dari persamaan filter dalam transformasi Laplace. Contoh ini diadaptasi dari Example 8.4 di buku “Lizhe Tan, Digital Signal Processing, Fundamentals and Applications” halaman 324.
Misal diketahui suatu filter dalam domain s (Laplace) dengan persamaan sebagai berikut:
\(H(s)=\frac{10}{s+10} \)
Untuk mengubah ke bentuk digital, kita perlu tentukan perioda sampling. Misal dipilih perioda sampling T=0.01 detik
Persamaan transformasi s ke z sebagai berikut
\( s=\frac{2(z -1) }{Tz + 1} \)
H(s) diubah ke H(z) dengan cara substitusi s pada H(s). T=0.01 dimasukkan ke persamaan transformasi. Maka didapat persamaan berikut:
Selanjutnya terapkan teknik di Bab 6 (Example 6.5) untuk mengubah persamaan dalam domain (z) ke domain waktu (n).
Akan didapat persamaan difference dalam n sebagai berikut:
y(n)=0.0476 x(n) + 0.0476 x(n-1) + 0.9048 y(n-1)
Simulasi
Tahap selanjutnya adalah simulasi persamaan difference tersebut dengan input fungsi step.
Tahap simulasi ini penting untuk mengecek apakah filter digital yang dihasilkan memiliki perilaku yang sama dengan filter analog di awal. Jika hasilnya berbeda, ada kemungkinan salah perhitungan atau salah koding.
Simulasi dapat dilakukan dengan bahasa pemrograman apa saja, misal C, C++, Matlab, Python, dan sebagainya.
Simulasi di bawah ini dibuat dengan bahasa Python. GUI yang dipakai adalah Jupyter Notebook
import matplotlib
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.ticker import AutoMinorLocator
from matplotlib import gridspec
import matplotlib.ticker as ticker
%matplotlib inline
t=-1 # start time at -1
xn=0
xn1=0
yn1=0
period=0.01
times=np.linspace(-1, 10, 111).reshape(111, 1)
xs=[]
ys=[]
ts=[]
for counter in range(0,200):
if t<0:
xn=0
else:
xn=1
t=t+period
xs.append(xn)
y=0.04676 * xn + 0.0476 * xn1 + 0.9048 * yn1
ys.append(y)
ts.append(t)
yn1=y
xn1=xn
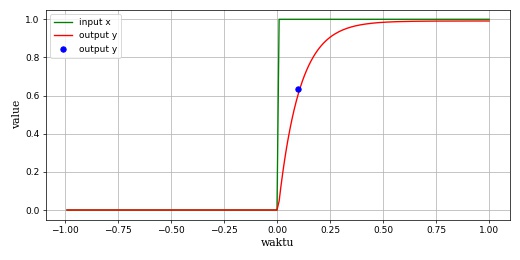
Berikut ini output sistem (merah) terhadap input step (warna hijau).
time constant = 1/10
Titik biru adalah t = time constant, dengan value = 63.2%. Posisi titik biru ini pada grafik merah, sehingga dapat disimpulkan respon sistem ini cocok dengan yang diharapkan.
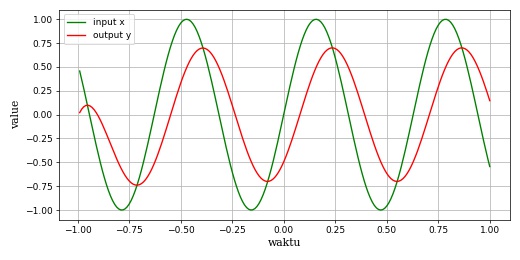
Selanjutnya adalah memberi sinyal sinusoidal dengan frekuensi = frekuensi cut-off ke filter tersebut . Menurut teori, amplitudo pada steady state adalah 0.707 x amplitudo maksimum.
Berikut ini kode untuk memberikan sinyal sinusoida.
t=-1 # start time at -1
xn=0
xn1=0
yn1=0
period=0.01
times=np.linspace(-1, 10, 111).reshape(111, 1)
xs=[]
ys=[]
ts=[]
w=10
for counter in range(0,200):
t=t+period
xn=math.sin(w*t)
xs.append(xn)
y=0.04676 * xn + 0.0476 * xn1 + 0.9048 * yn1
ys.append(y)
ts.append(t)
yn1=y
xn1=xn
Grafik tersebut menunjukkan amplitudo output (merah) ada di sekitar 0.7 dari amplitudo sinyal input (hijau). Terjadi pergeseran fasa sekitar 45 derajat.
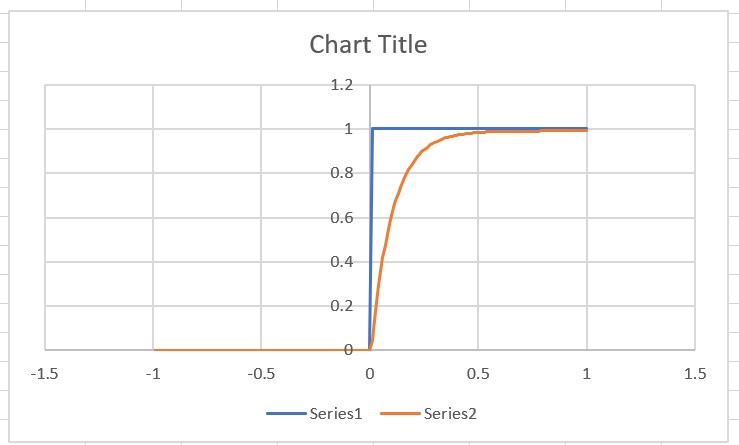
Implementasi Bahasa C di Windows
Tahap selanjutnya adalah membuat implementasi filter dengan bahasa C.
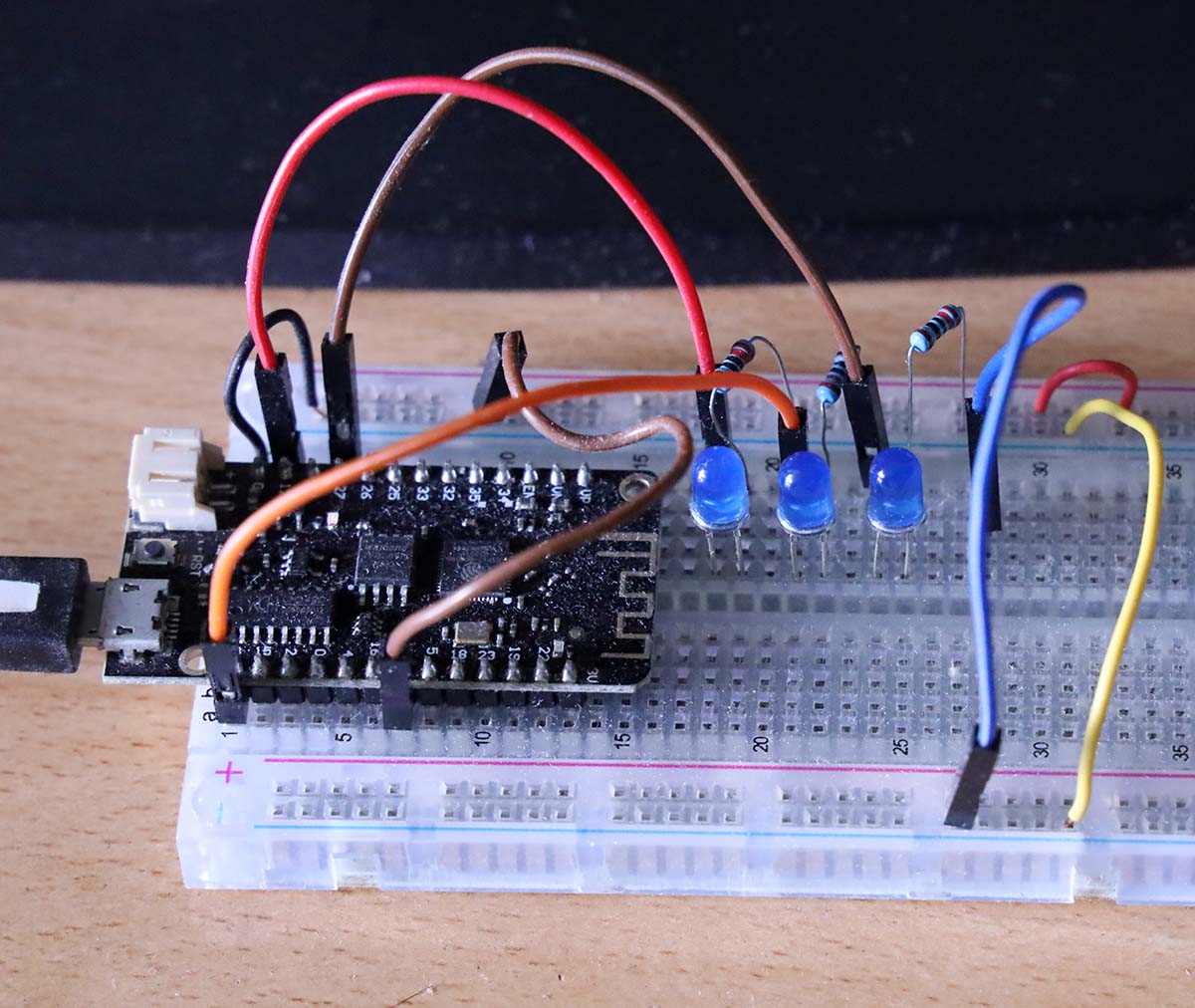
Pada tulisan ini diuraikan cara mengendalikan lampu secara wireless dengan ThingsBoard. Mikroprosesor yang dipakai adalah ESP32. Metode yang dipakai adalah RPC (Remote Procedure Call)
TOKEN adalah kode token dari perangkat. Diambil dari ThingsBoard
#include <WiFi.h> // WiFi control for ESP32
#include <ThingsBoard.h> // ThingsBoard SDK
// Helper macro to calculate array size
#define COUNT_OF(x) ((sizeof(x)/sizeof(0[x])) / ((size_t)(!(sizeof(x) % sizeof(0[x])))))
// WiFi access point
#define WIFI_AP_NAME "WIFI_AP_NAME "
// WiFi password
#define WIFI_PASSWORD "WIFI_PASSWORD "
// See https://thingsboard.io/docs/getting-started-guides/helloworld/
// to understand how to obtain an access token
#define TOKEN "yd8R3K3GE61Drm7TtvgF"
// ThingsBoard server instance.
#define THINGSBOARD_SERVER "192.168.0.90"
#define ONBOARD_LED 22
// Baud rate for debug serial
#define SERIAL_DEBUG_BAUD 115200
// Initialize ThingsBoard client
WiFiClient espClient;
// Initialize ThingsBoard instance
ThingsBoard tb(espClient);
// the Wifi radio's status
int status = WL_IDLE_STATUS;
// Array with LEDs that should be controlled from ThingsBoard, one by one
uint8_t leds_control[] = { 12, 13, 27 };
// Main application loop delay
int quant = 20;
// Initial period of LED cycling.
int led_delay = 1000;
// Period of sending a temperature/humidity data.
int send_delay = 2000;
// Time passed after LED was turned ON, milliseconds.
int led_passed = 0;
// Time passed after temperature/humidity data was sent, milliseconds.
int send_passed = 0;
// Set to true if application is subscribed for the RPC messages.
bool subscribed = false;
// LED number that is currenlty ON.
//int current_led = 0;
// Processes function for RPC call "setGpioStatus"
// RPC_Data is a JSON variant, that can be queried using operator[]
// See https://arduinojson.org/v5/api/jsonvariant/subscript/ for more details
RPC_Response processSetGpioState(const RPC_Data &data)
{
Serial.println("Received the set GPIO RPC method");
int pin = data["pin"];
bool enabled = data["enabled"];
if (pin < COUNT_OF(leds_control)) {
Serial.print("Setting LED ");
Serial.print(pin);
Serial.print(" to state ");
Serial.println(enabled);
digitalWrite(leds_control[pin], enabled);
}
return RPC_Response(data["pin"], (bool)data["enabled"]);
}
// RPC handlers
RPC_Callback callbacks[] = {
{ "setGpioStatus", processSetGpioState },
};
// Setup an application
void setup() {
// Initialize serial for debugging
Serial.begin(SERIAL_DEBUG_BAUD);
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
InitWiFi();
for (size_t i = 0; i < COUNT_OF(leds_control); ++i) {
pinMode(leds_control[i], OUTPUT);
}
pinMode(ONBOARD_LED, OUTPUT); \
// LED check
digitalWrite(leds_control[0], HIGH);
delay(500);
digitalWrite(leds_control[1], HIGH);
delay(500);
digitalWrite(leds_control[2], HIGH);
delay(500);
digitalWrite(leds_control[0], LOW);
delay(500);
digitalWrite(leds_control[1], LOW);
delay(500);
digitalWrite(leds_control[2], LOW);
delay(500);
}
// Main application loop
void loop() {
delay(quant);
led_passed += quant;
send_passed += quant;
// Reconnect to WiFi, if needed
if (WiFi.status() != WL_CONNECTED) {
reconnect();
return;
}
// Reconnect to ThingsBoard, if needed
if (!tb.connected()) {
subscribed = false;
// Connect to the ThingsBoard
Serial.print("Connecting to: ");
Serial.print(THINGSBOARD_SERVER);
Serial.print(" with token ");
Serial.println(TOKEN);
if (!tb.connect(THINGSBOARD_SERVER, TOKEN)) {
Serial.println("Failed to connect");
return;
}
}
// Subscribe for RPC, if needed
if (!subscribed) {
Serial.println("Subscribing for RPC...");
// Perform a subscription. All consequent data processing will happen in
// callbacks as denoted by callbacks[] array.
if (!tb.RPC_Subscribe(callbacks, COUNT_OF(callbacks))) {
Serial.println("Failed to subscribe for RPC");
return;
}
Serial.println("Subscribe done");
subscribed = true;
}
if (send_passed > send_delay) {
send_passed = 0;
}
// Process messages
tb.loop();
static int blink_counter = 0;
if (blink_counter < 50) {
digitalWrite(ONBOARD_LED, LOW);
} else {
digitalWrite(ONBOARD_LED, HIGH);
}
blink_counter++;
if (blink_counter >= 100) {
blink_counter = 0;
}
}
void InitWiFi()
{
Serial.println("Connecting to AP ...");
// attempt to connect to WiFi network
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("Connected to AP");
}
void reconnect() {
// Loop until we're reconnected
status = WiFi.status();
if ( status != WL_CONNECTED) {
WiFi.begin(WIFI_AP_NAME, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("Connected to AP");
}
}
Berikut ini software PHP untuk mengendalikan LED dari Windows/Ubuntu
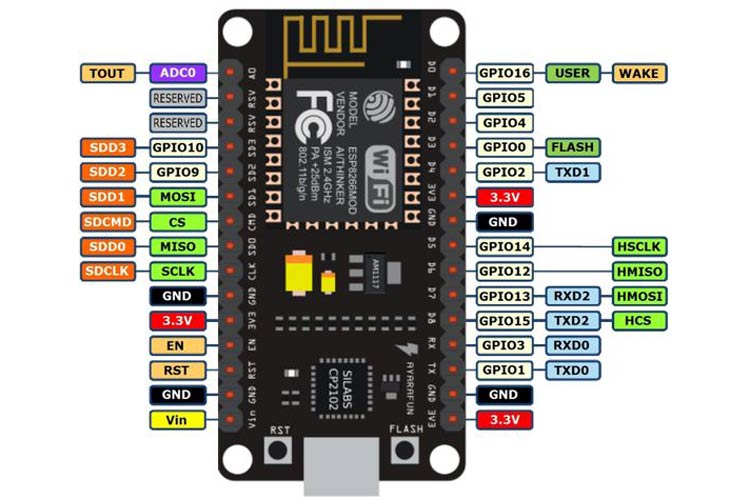
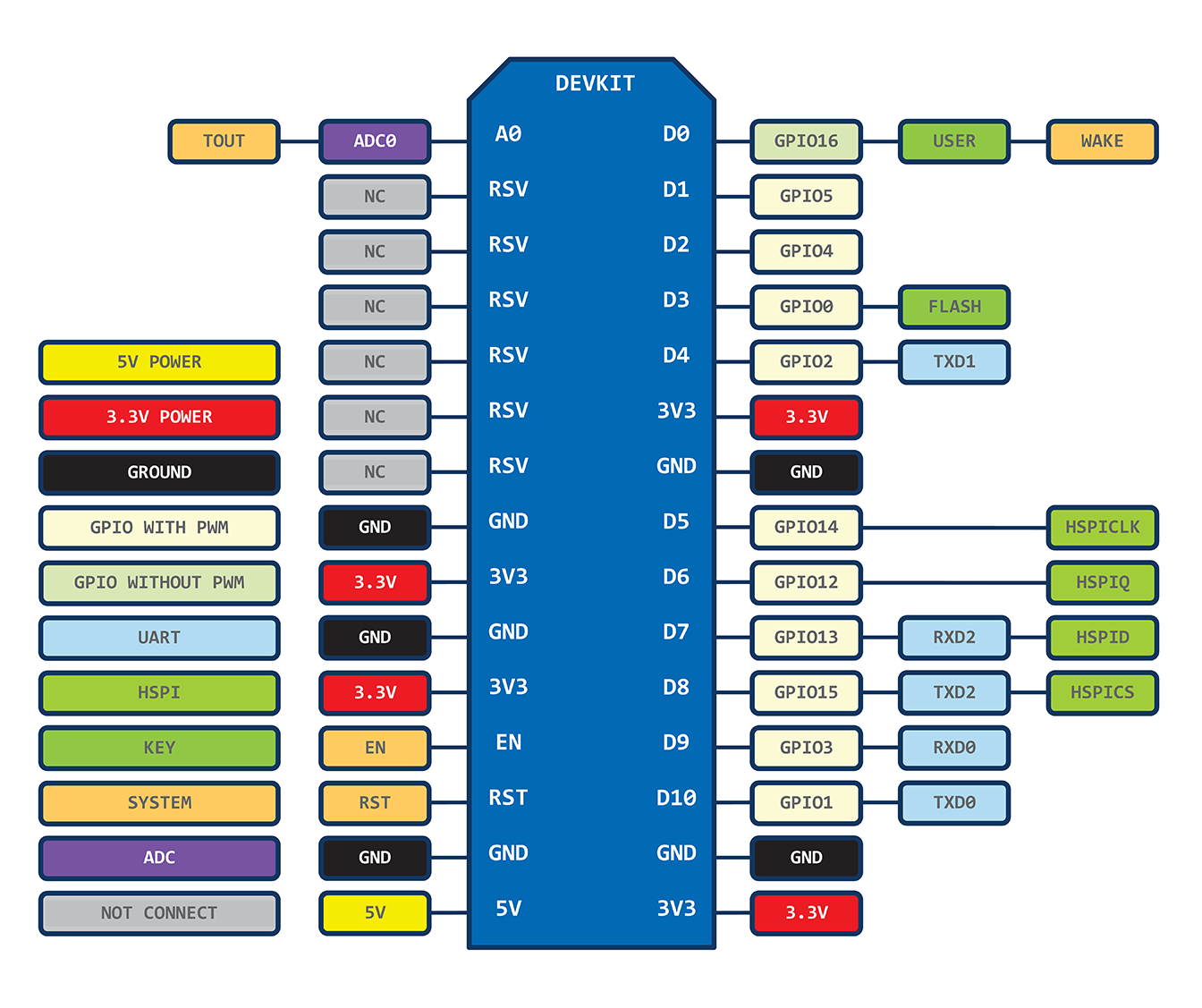
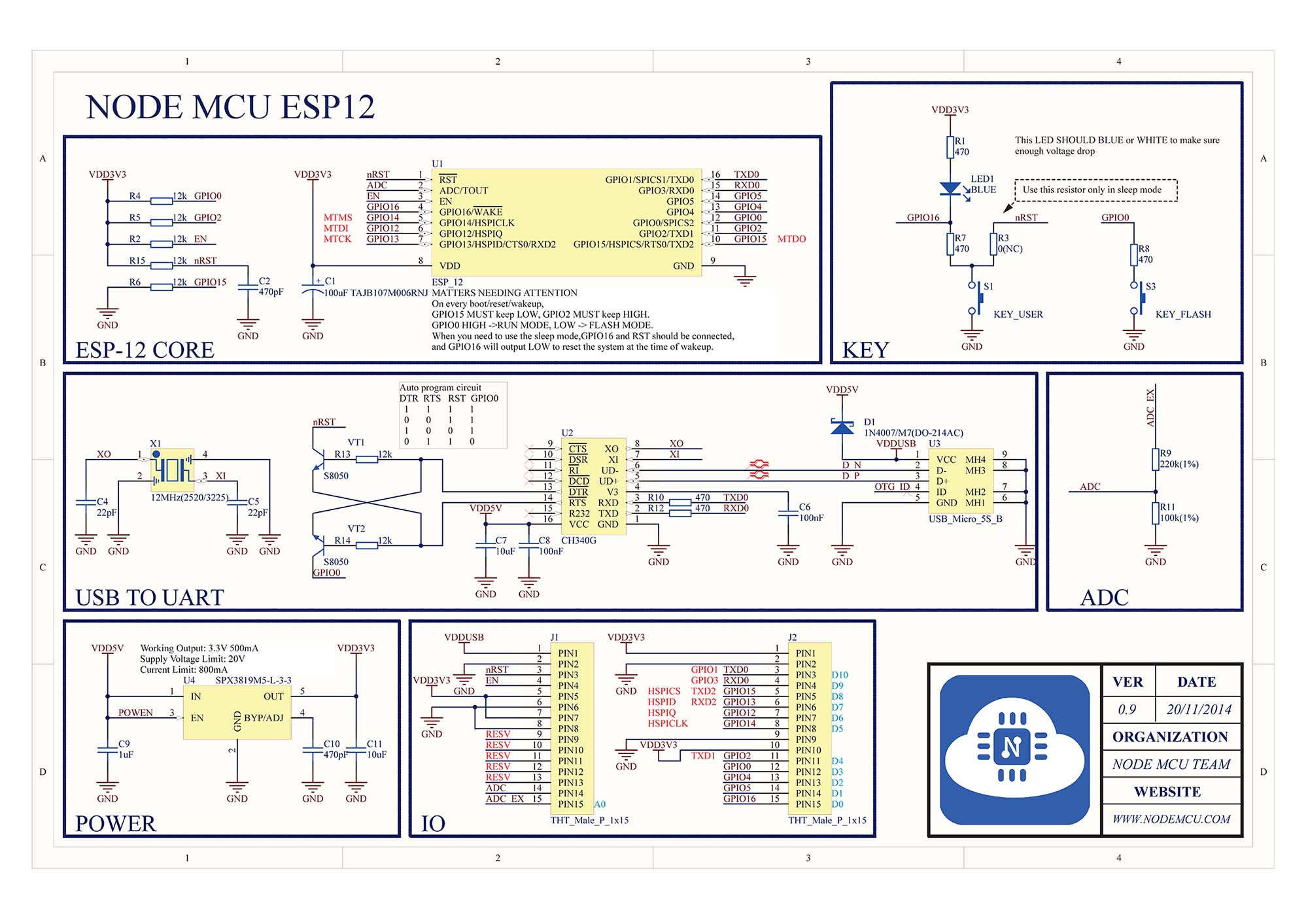
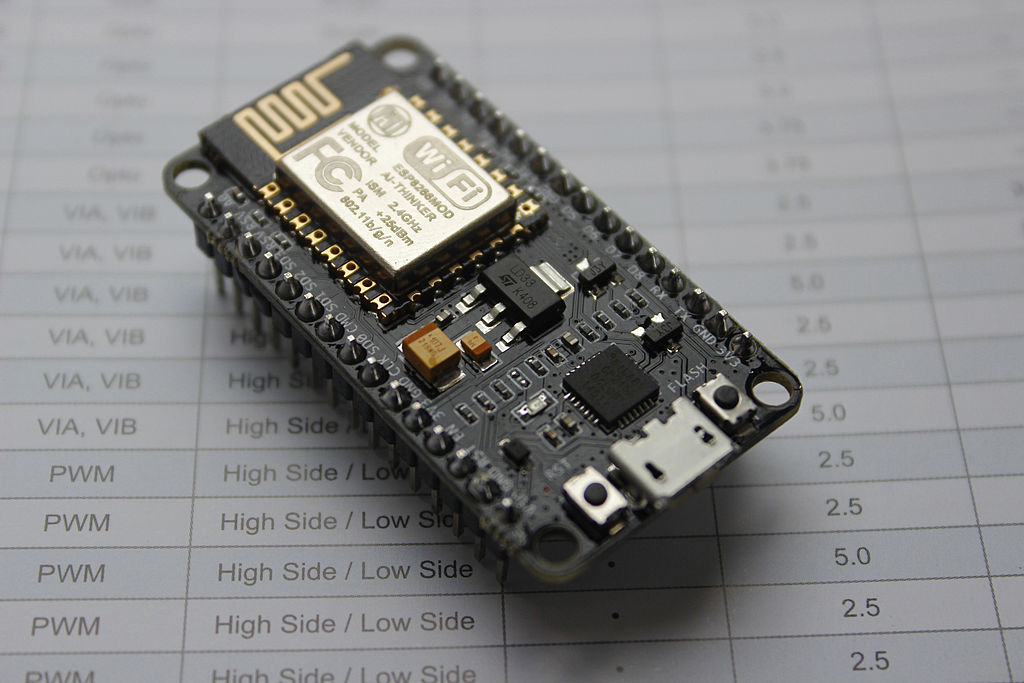
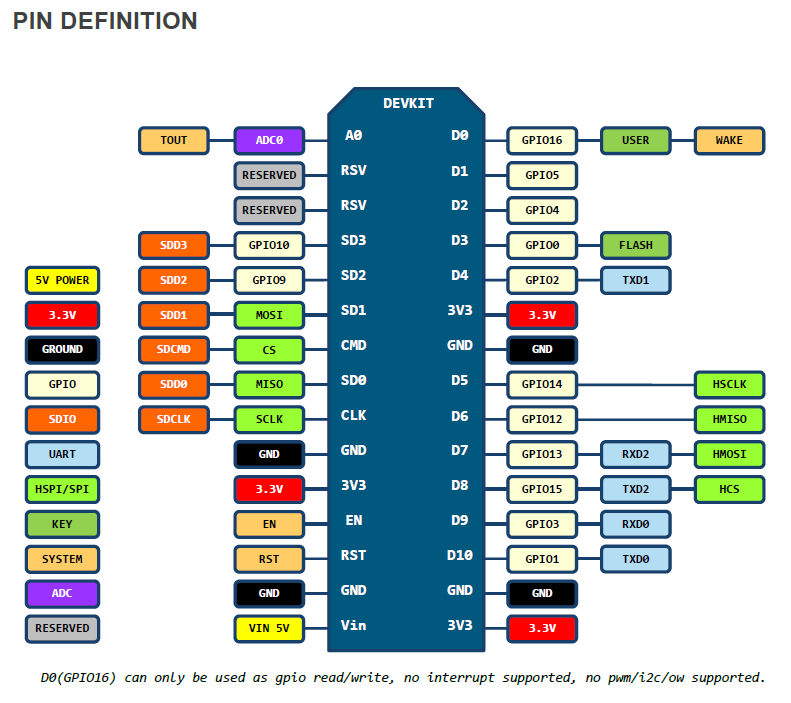
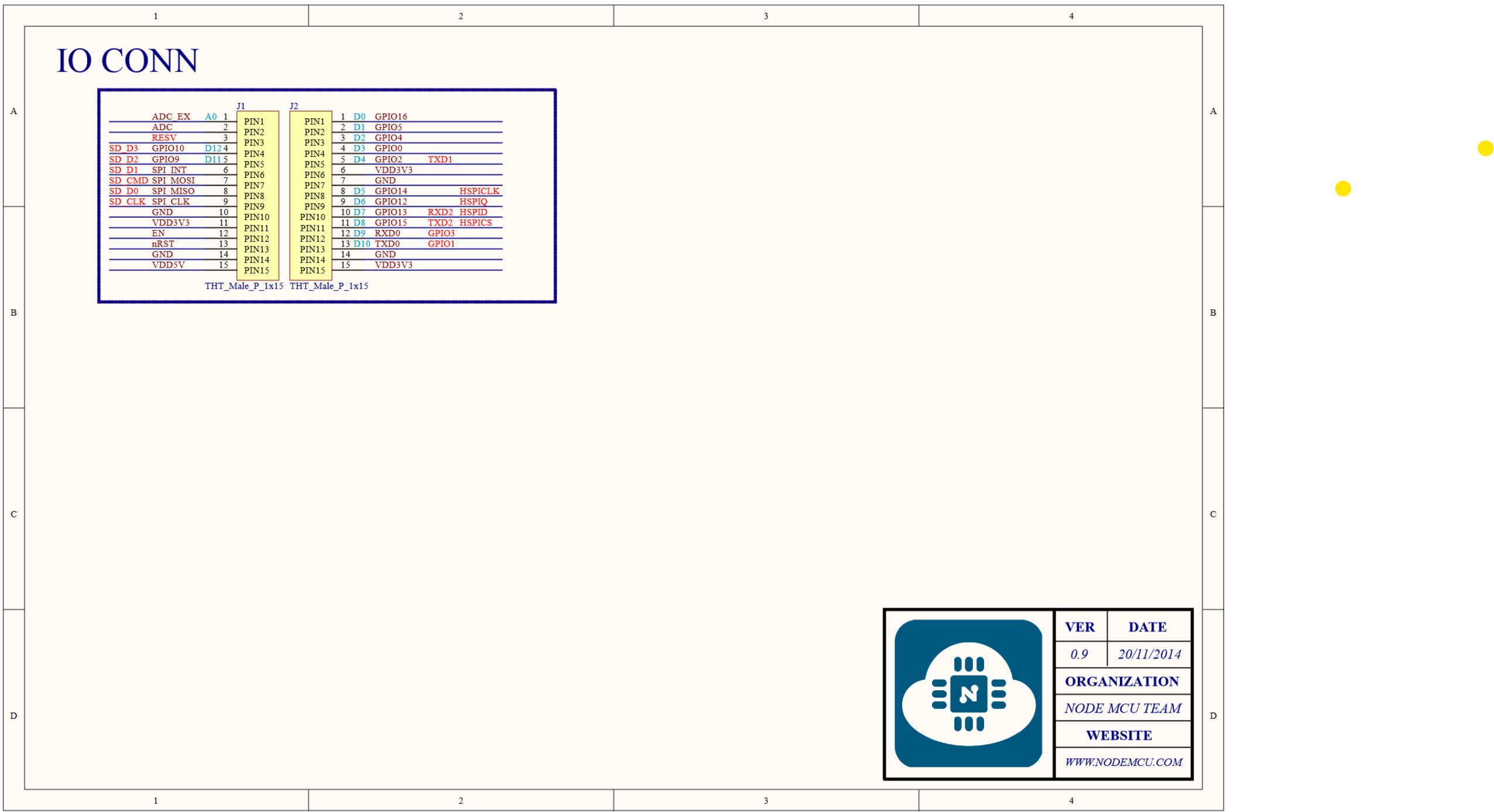
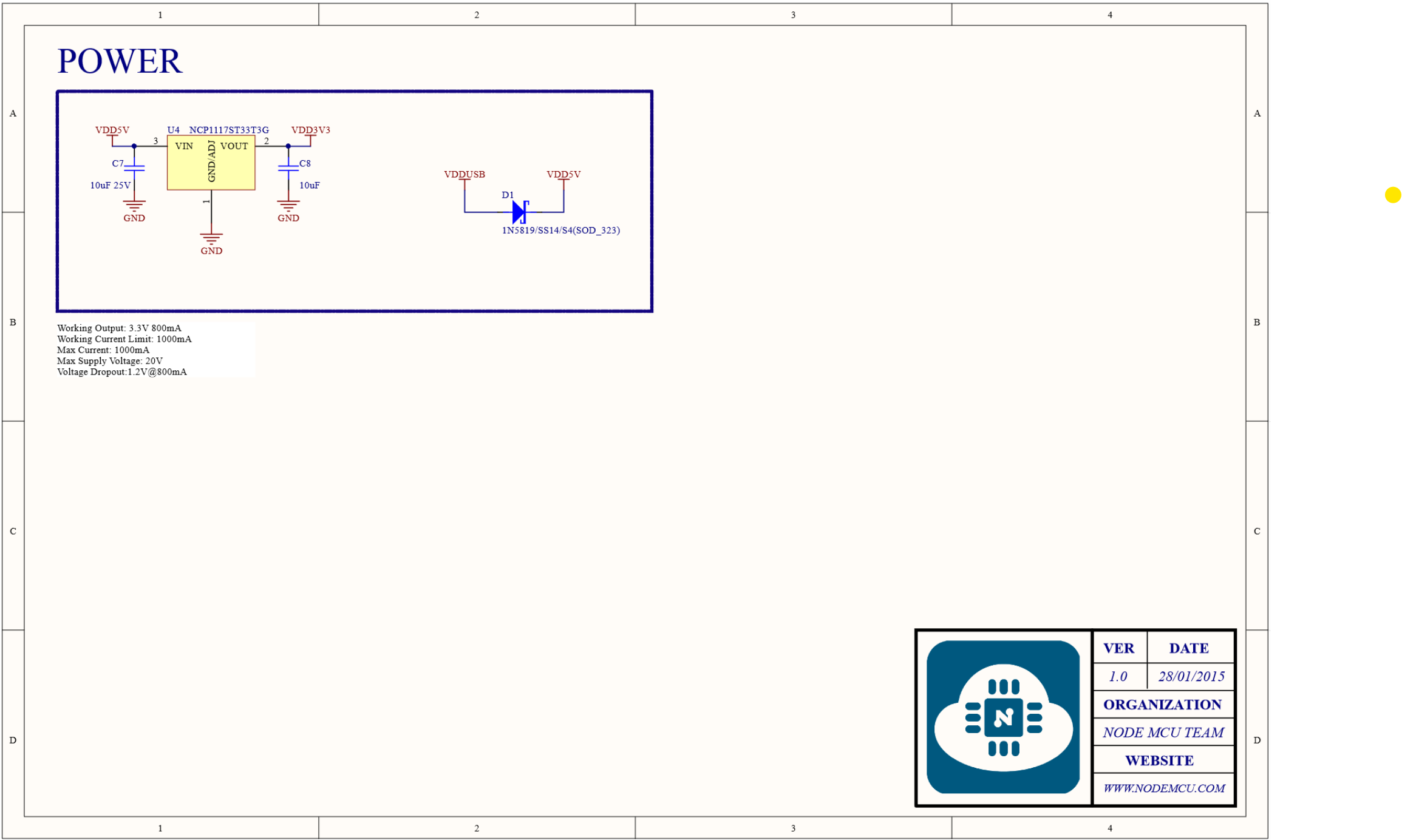
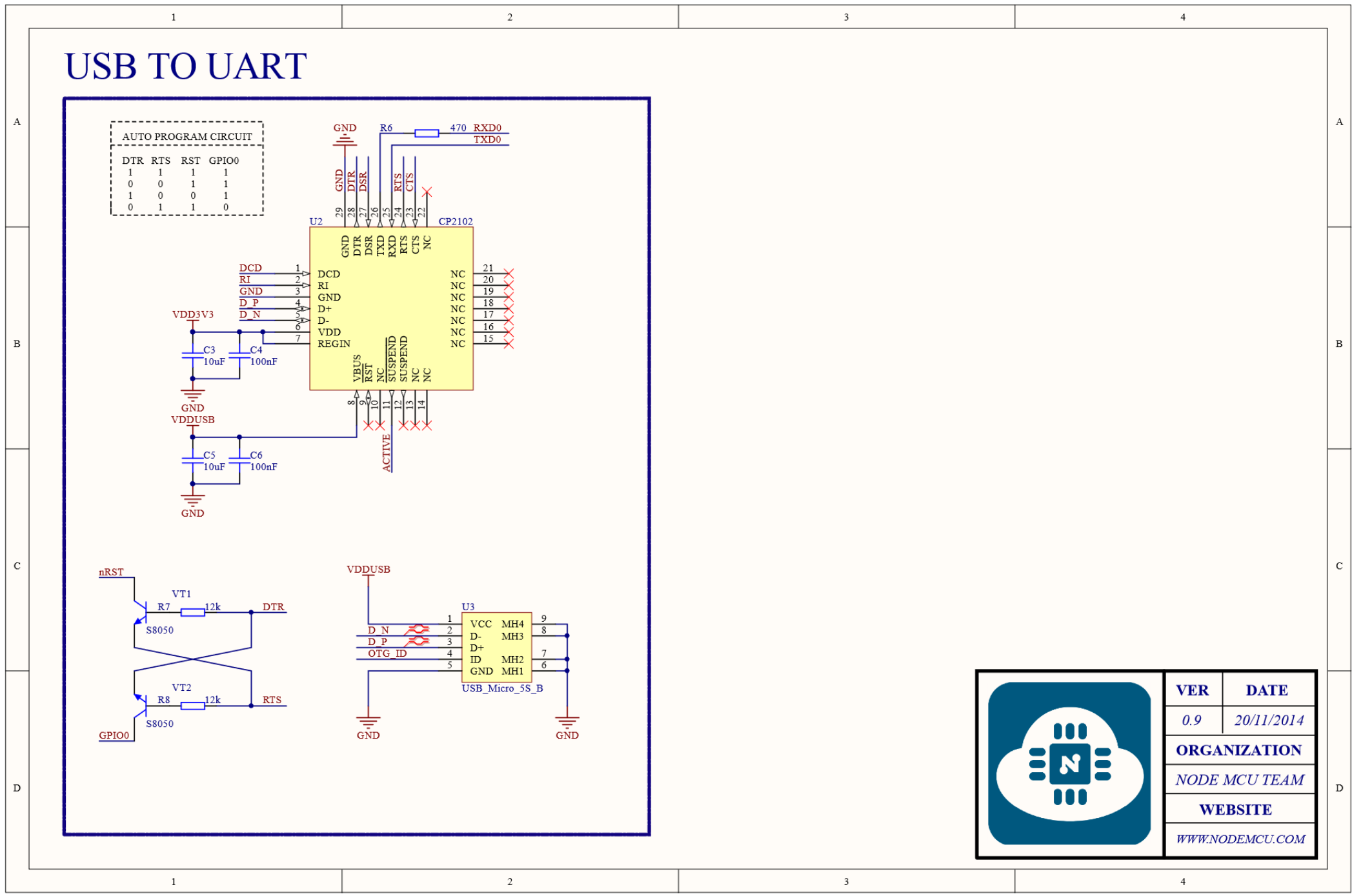
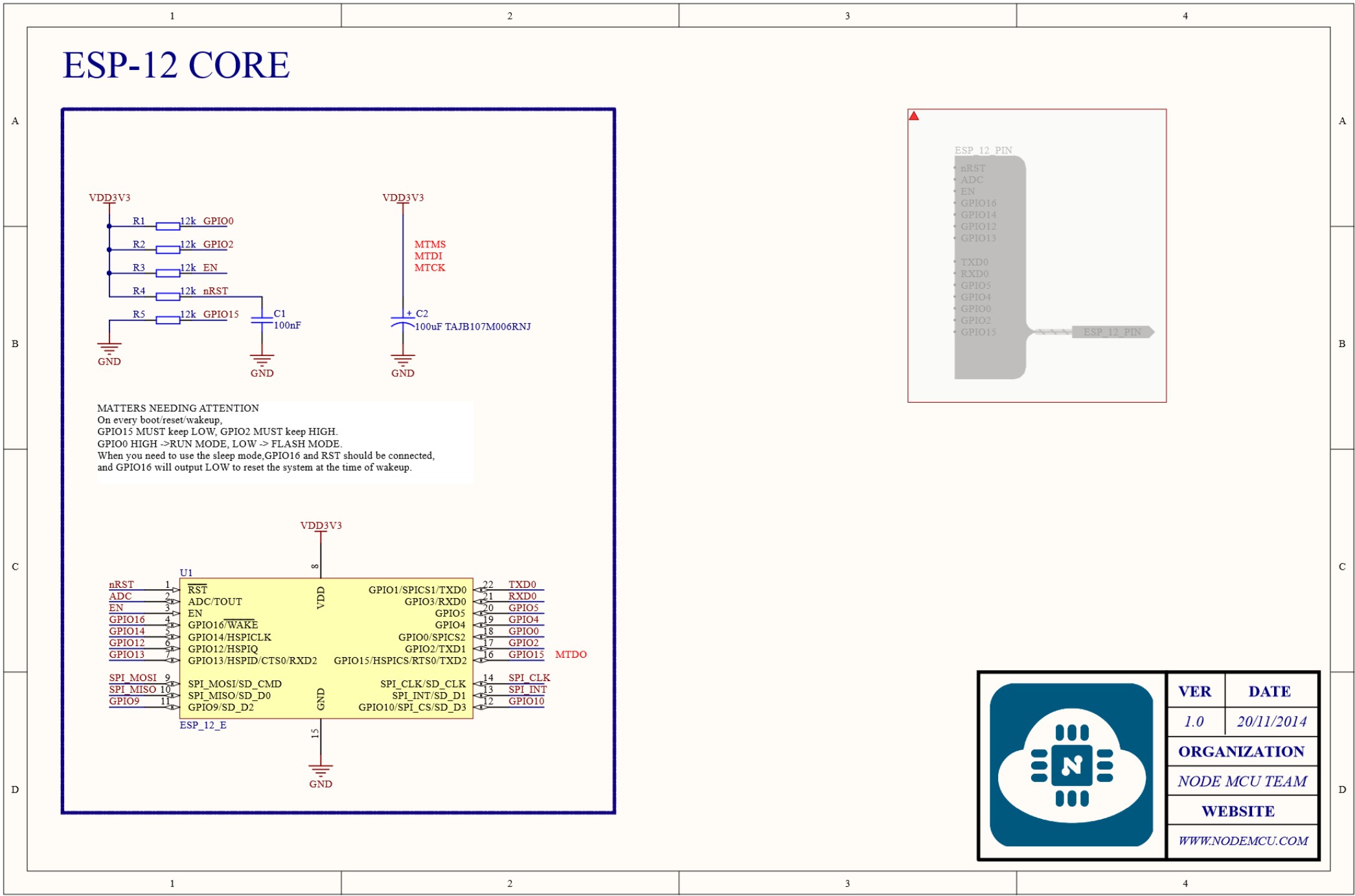
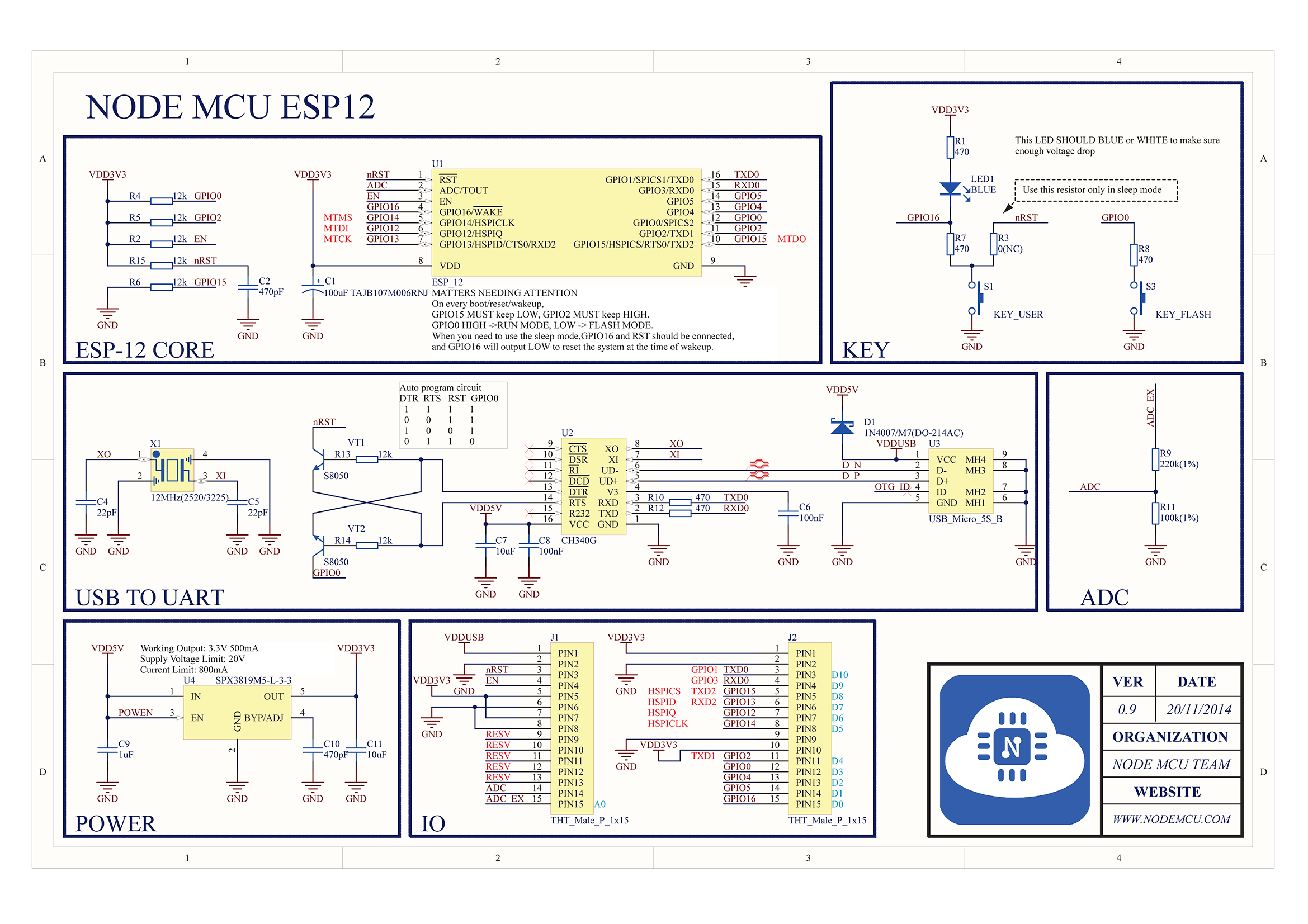
Skema rangkaian NodeMCU Devkit V1.0 KonektorSkema rangkaian NodeMCU Devkit V1.0 Catu DayaSkema rangkaian NodeMCU Devkit V1.0 SerialSkema rangkaian NodeMCU Devkit V1.0 Inti
Referensi
Situs Resmi NodeMCU https://www.nodemcu.com/index_en.html
Masuk ke ThingsBoard web interface (misal alamatnya http://192.168.0.90:8080)
Klik di “Devices”
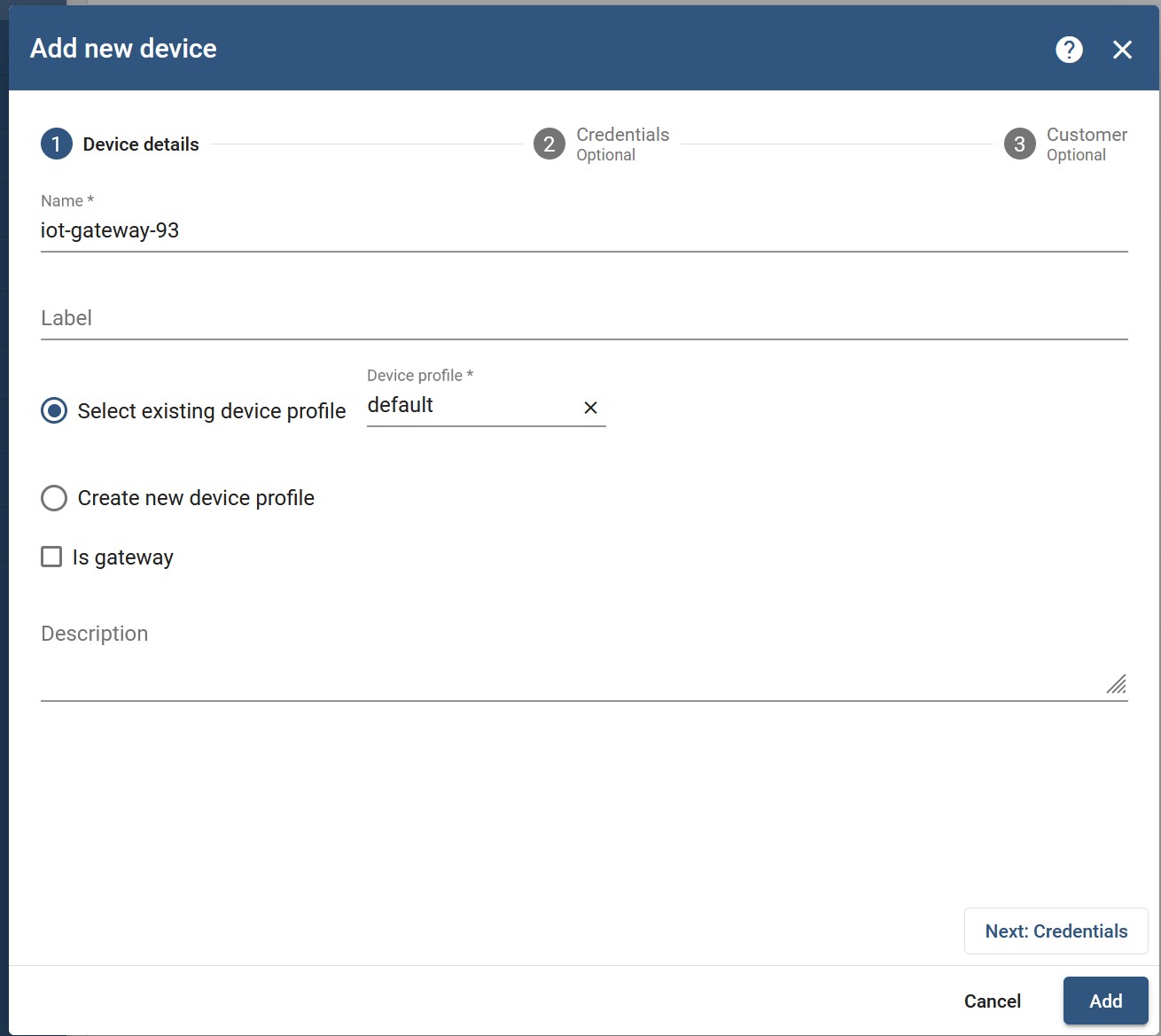
Klik di tanda “+”, kemudian “Add new device” untuk membuat device baru
Masukkan nama device. Misal “iot-gateway-93”
Klik di checkbutton “is gateway” untuk menandakan bahwa device yang dibuat adalah IoT gateway
Klik “Add”. Maka pembuatan Device IoT Gateway selesai.
Selanjutnya adalah mengambil Access Token.
Klik di menu “Devices”. Akan muncul daftar devices yang ada
Klik di device IoT gateway yang baru dibuat
Klik di “Copy access token”, maka access token akan tersimpan di clipboard Windows.
selanjutnya masuk ke console Ubuntu untuk mengedit file konfigurasi ThingsBoard Gateway.
edit file /etc/thingsboard-gateway/config/tb_gateway.yaml dengan teks editor editor, misalnya dengan ‘nano’.
Ganti “host” dengan alamat dari server ThingsBoard. Defaultnya adalah demo.thingsboard.io. Misal pada contoh ini alamat server ThingsBoard adalah 192.168.0.90, sehingga alamat host diganti menjadi 192.168.0.90
port tetap di 1883 (MQTT) . Umumnya tidak ada perubahan.
Ganti string PUT_YOUR_GW_ACCESS_TOKEN_HERE dengan access token yang dicopy di atas. Misal access token adalah KbllULqUCAj1PWt1pvCQ
Pesan itu normal, karena memang MQTT belum dikonfigurasi.
Selanjutnya lihat di web interface ThingsBoard untuk melihat apakah sudah ada koneksi dari thingsboard gateway.
Caranya:
Masuk ke daftar devices dengan cara klik “Devices” di menu web ThingsBoard
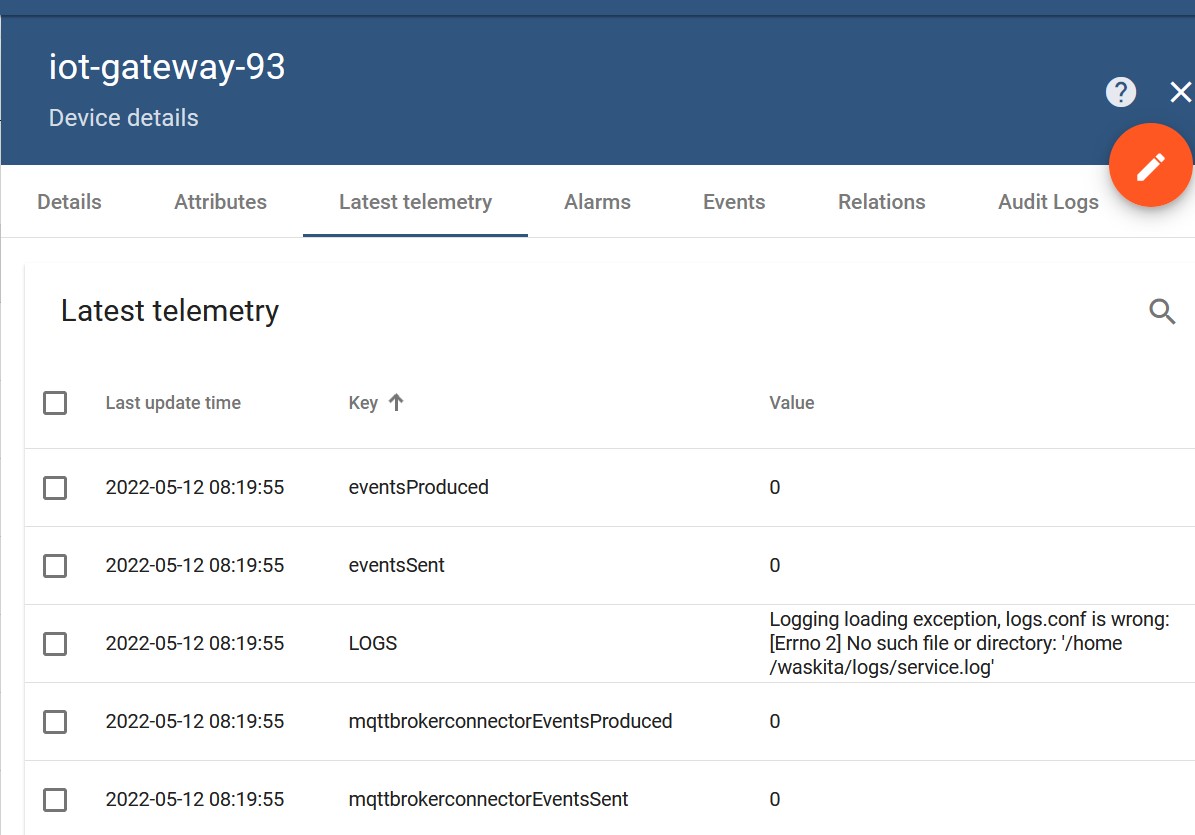
Klik di IoT gateway yang baru dibuat, misal tadi namanya adalah “iot-gateway-93”
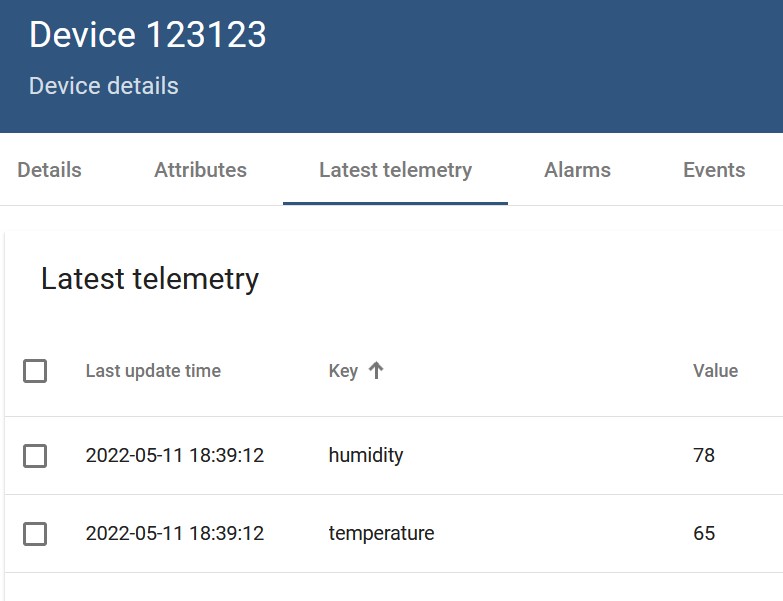
Klik di “Latest telemetry”. Seharusnya akan muncul beberapa key berikut ini, dengan “last update time” sesuai dengan waktu start thingsboard gateway di console Ubuntu
eventsProduced
eventsSent
LOGS
mqttbrokerconnectorEventsProduced
mqttbrokerconnectorEventsSent
Jika muncul data telemetry seperti di atas, maka artinya ThingsBoard gateway sudah berhasil berkomunikasi dengan ThingsBoard Server.
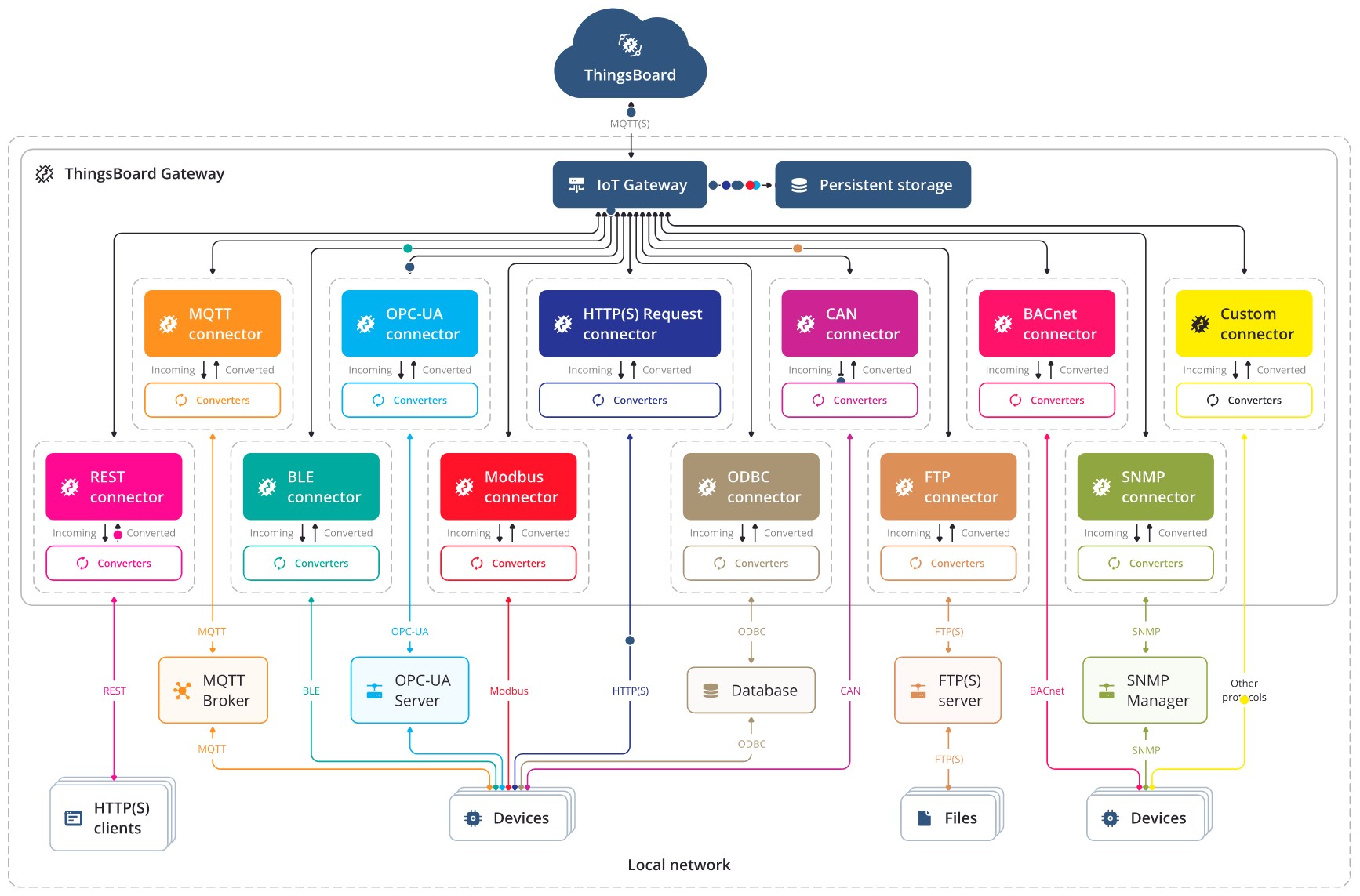
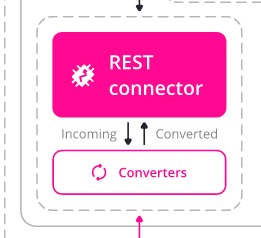
Tahap selanjutnya adalah melakukan konfigurasi connector di ThingsBoard Gateway supaya dapat menerima / mengirim data ke devices yang ada. Contohnya untuk REST API dapat dilihat di artikel “Koneksi REST API ke ThingsBoard IoT Gateway“
Pada contoh ikni script thingsboard-gateway perlu dijalankan secara manual. Jika ingin dijalankan secara otomatis, dapat dibuat menjadi service atau ditambahkan ke crontab ataupun etc/rc.local
Konfigurasi File Log
Pada contoh file konfigurasi yang diberikan, file log disimpan di “./log”, jadi relatif terhadap dari mana kita menjalankan thingsboard-gateway. Supaya rapi, file log disimpan di /var/log/thingsboard-gateway. Untuk itu edit file /etc/thingsboard-gateway/config/logs.conf untuk mengubah lokasi file log sesuai keinginan.
Berikut ini bagian dari file logs.conf yang mengatur lokasi file log
Setting host di contoh aslinya menggunakan 127.0.0.1, namun kalau pakai IP ini tidak dapat dikontak dari komputer lain. Supaya dapat dikontak dari IP lain, maka menggunakan 0.0.0.0 , atau bisa juga menggunakan IP address dari IoT Gateway tersebut
“port”
Port yang dipakai bebas. Pada contoh ini menggunakan port 5000 seperti sesuai contoh file aslinya.
“SSL”
konfigurasi ini tidak menggunakan security
“mapping”
Bagian ini berisi konfigurasi penerimaan data dari client dan juga pemetaan data untuk dikirim ke ThingsBoard Core.
“endpoint”: untuk mendefinisikan URL dari REST API
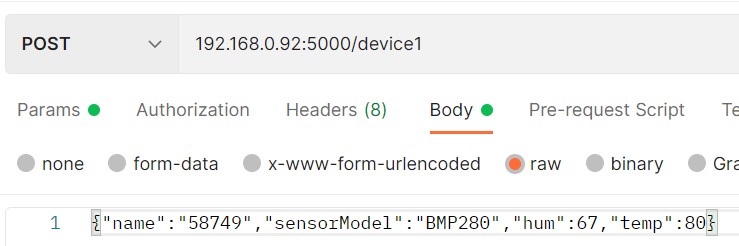
IoT Gateway ini misalnya menggunakan IP address 192.168.0.92. Jadi alamat dari REST API adalah http://192.168.0.92:5000/device1
“HTTPMethods”: konfigurasi ini menggunakan HTTP POST. Sesuai contoh dari Thingsboard
“security”: anonymous, tidak menggunakan password samsekali
“converter”: berisi pemetaan data yang diterima, ke parameter yang akan dikirim ke ThingsBoard Core
“deviceNameExpression”: “Device ${name}”, : baris ini artinya mengharapkan adanya parameter “name” dari data yang masuk. Data ini kemudian akan dikirim sebagai string “Device $name” ke ThingsBoard Core.
“attributes”: berisi atribut dari device di client
“timeseries”: berisi entry data yang akan dimasukkan sebagai data telemetri di Device di ThingsBoard Core.
Pada contoh ini ada 2 entry data, yaitu temperatur dan humidity. Parameter yang diharapkan diterima adalah “temp” dan “hum”. Parameter “temp” akan dipetakan ke parameter “temperature”, dan parameter “hum” akan dipetakan ke parameter “humidity”.
Client Dengan PHP CURL
Berikut ini contoh client menggunakan PHP Curl
<?php
// API URL
$url = 'http://192.168.0.92:5000/device1';
// Create a new cURL resource
$ch = curl_init($url);
// Setup request to send json via POST
$body_array = array();
$body_array["name"] = "123123";
$body_array["sensorModel"] = "CX811";
$body_array["hum"] = 78;
$body_array["temp"] = 65;
$body = json_encode($body_array);
// Attach encoded JSON string to the POST fields
curl_setopt($ch, CURLOPT_POSTFIELDS, $body);
// Set the content type to application/json
curl_setopt($ch, CURLOPT_HTTPHEADER, array('Content-Type:application/json'));
// curl_setopt($ch, CURLOPT_RETURNTRANSFER, true);
// Execute the POST request
$result = curl_exec($ch);
// Close cURL resource
curl_close($ch);
print_r($payload);
print_r($result);
Berikut ini data yang masuk ke ThingsBoard sebagai latest telemetry
Jika koneksi berhasil, pada console thingsboard dan file log “connector.log” akan muncul pesan seperti berikut ini:











{kind=link}
{kind=link}